

Arduino Uno Wifi Rev2 (คำนวนมุม Roll และ Pitch จากค่าความเร่งที่วัดได้จาก Accelerometer)
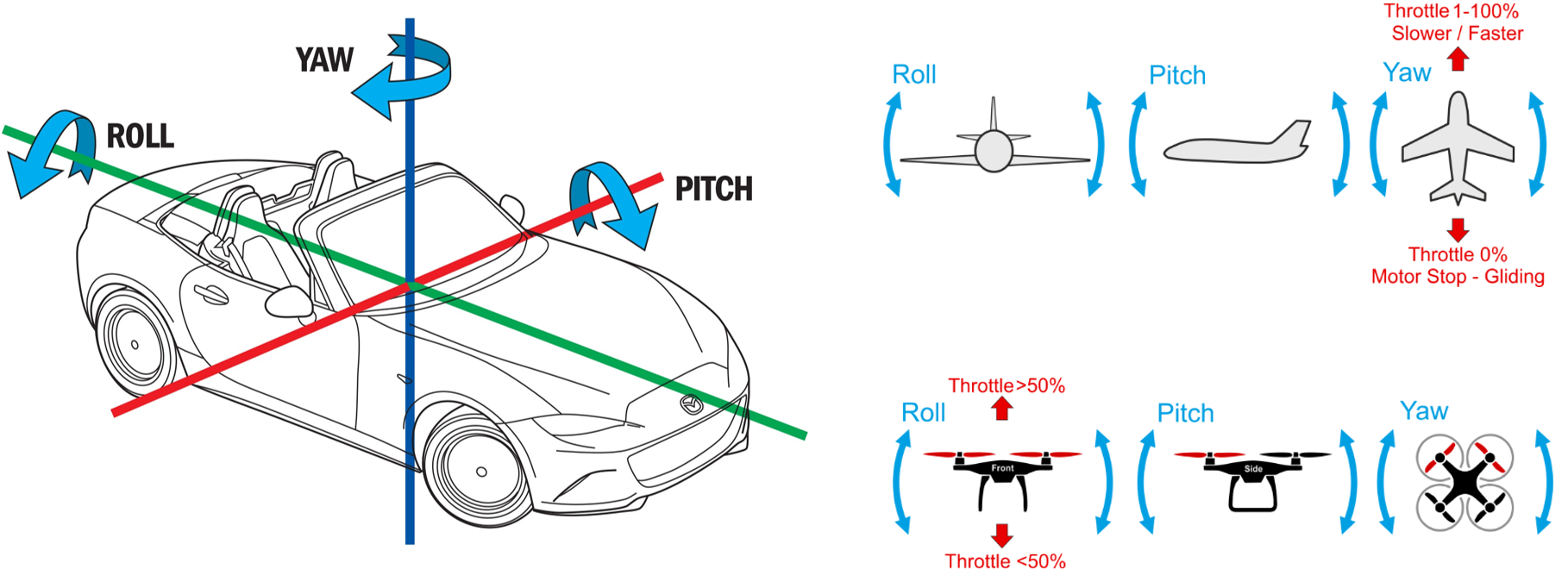
Orientation หรือบางครั้งก็เรียกว่า Attitude คือตำแหน่งการวางตัวของวัตถุในระนาบ 3 มิติ โดยนิยมบอกด้วยมุม roll, pitch และ yaw ที่มีหน่วยเป็น องศา (degree) หรือ เรเดียน (radian) (ดูภาพที่ 1 ประกอบ)
โดยมุม roll pitch และ yaw สามารถคำนวนได้จากค่า ความเร่ง เพียงอย่างเดียว หรือ ใช้ทั้งค่าความเร่งและค่าความเร็วเชิงมุมนำมาผสม (fusion) กันก็ได้ (บทความถัดไปจะอธิบายกรณี fusion) ทั้งนี้การทำ fusion จะได้ค่า roll pitch yaw ที่เสถียรกว่าแบบใช้ค่าความเร่งที่วัดได้จาก accelerometer อย่างเดียว
ในบทความนี้จะใช้ค่าความเร่งของ 3 แกน (x, y, z) ที่วัดได้จาก accelerometer เพียงอย่างเดียวมาคำนวนมุม pitch และ roll
หมายเหตุ: เนื่องจากข้อจำกัดของ accelerometer ค่า yaw ที่วัดได้จะมีความคลาดเคลื่อนสูงจนนำมาใช้ไม่ได้ โดยทั่วไปถ้าใช้แค่ค่าความเร่งที่วัดได้จาก accelerometer เพียงอย่างเดียวมุม yaw จะไม่ถูกนำมาใช้ ดังนั้นในบทความนี้เราจะพูดถึงแค่ roll และ pitch เท่านั้น
โดยธรมมชาติของ aceelerometer ค่าความเร่งที่วัดได้ในแต่ละแกน (Xg, Yg, Zg) จะมีสัญญาณรบกวนผสมอยู่ จึงควรทำการลดปริมาณสัญญาณรบกวนนี้ โดยใช้ Low-Pass Filter ซึ่ง implement แยกแต่ละแกน x, y และ z ได้ดังนี้![]() โดย
โดย
y(k) คือค่าที่ถูกฟิลเตอร์แล้ว ณ เวลาปัจจุบัน k (loop ปัจจุบัน)
y(k-1) คือค่าก่อนถูกฟลิเตอร์ ณ เวลาก่อนหน้า k-1 (loop ที่แล้ว)
x(k) คือค่าความเร่ง ณ เวลาปัจจุบัน k ที่วัดได้ (loop ปัจจุบัน)
alpha คือค่าคงที่ของ lowpass filter มีค่าอยู่ในช่วง [0-1] และค่า default ส่วนมากจะใช้เป็น 0.5 แต่ทั้งนี้สามารถปรับเปลี่ยนตามความเหมาะสม
หลังจากที่ได้ความเร่งของทั้ง 3 แกน ได้ถูกฟิลเตอร์แล้ว เราสามารถคำนวณหา pitch และ roll ได้ดังสมการนี้
ซึ่งหากใช้บอร์ด Arduino Uno WiFi Rev2 ที่มี accelerometer บนบอร์ดอยู่แล้วการ implement สมการข้างต้นสามารถทำได้อย่างรวดเร็ว (ดูบทความก่อนหน้าสำหรับการติดตั้งบอร์ด) ดังนี้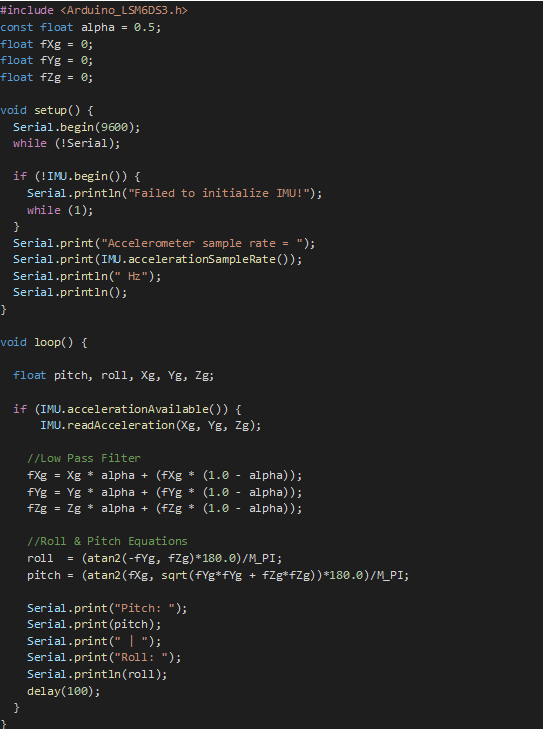
บทความ โดย Pink Panther


หน้านี้เป็นสารบัญของบทความที่ปรากฏในเว็บของ Arduitronics.com นะครับ จะขอแบ่งออกเป็นหัวข้อตามกลุ่มของสินค้าในร้านดังต่อไปนี้
- การลงโปรแกรม
- Raspberry Pi - Media Center (ตอนที่ 1)
- Raspberry Pi - Media Center (ตอนที่ 2)
- Raspberry Pi - How to Cook Raspbian OS
- Raspberry Pi - Connect to the real world : Part 1
- Raspberry Pi -- Connect to the real world GPIO : Part 2
- Raspberry Pi กับ Shield ของ Arduino
- Raspberry Pi - Analog Input with ADC (MCP3208)
- การลงโปรแกรมและไลบรารี่
- เรื่องของบอร์ด Arduino และ การใช้งานบอร์ด
- โมดูลเพื่อวัดค่าจากสิ่งแวดล้อม
- การใช้งาน PM 2.5 Sensor กับ UNO R3 (ตอนที่ 1)
- Arduino Uno Wifi Rev2 (คำนวนมุม Roll และ Pitch จากค่าความเร่งที่วัดได้จาก Accelerometer)
- Arduino Uno Wifi Rev2 (อ่านค่า gyro และ accelerometer ที่ติดมากับบอร์ด)
- การใช้งาน Arduino Uno WiFi (ตอนที่ 1)
- การใช้งาน Arduino Uno WiFi (ตอนที่ 2)
- การใช้งาน DHT11 Humitdity and Temperature Sensor กับบอร์ด Arduino
- Ultrasonic Ranging Module HC-SR04
- Inertial Sensors: หามุม Pitch และ Roll จากเซ็นเซอร์วัดความเร่ง
- Real Time Clock DS3231
- Moisture Sensor on Arduino and Android over Bluetooth
- Moisture Sensor on Arduino and Android over Bluetooth: Part 2
- I2C Communication: Case study of GY-30 (Ambient Light Sensor)
- Inertial Measurement Unit - GY-80 Module for Arduino: Part 1 ADXL345
- Inertial Measurement Unit - GY-80 Module for Arduino: Part 2 L3G4200D
- โมดูลสื่อสาร
- การใช้งาน Motor และ Relay
- การแสดงค่าต่างๆ (แสง สี เสียง จอ)
- โมดูลเพื่อการบันทึกค่าและส่งค่า
- เรื่องของสัญญาณ
- เรื่องของ GPS และการประยุกต์ใช้
- เรื่องทั่วไปเกี่ยวกับ Arduino


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
