


Arduino Uno Wifi Rev2 (อ่านค่า gyro และ accelerometer ที่ติดมากับบอร์ด)
หมายเหตุ:
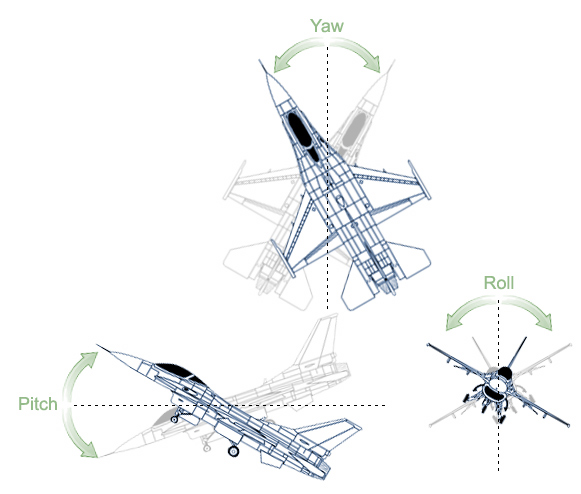
Gyroscope หรือ เซนเซอร์วัดความเร็วเชิงมุม ใช้วัดความเร็วเชิงมุมรอบแกน x,y,z (หน่วย degree/sec)
Accelerometer หรือ เซนเซอร์วัดความเร่ง ใช้วัดความเร่งในทิศทางของแกน x,y,x (หน่วย g)
โดยค่าที่อ่านได้จากทั้ง gyroscope (อัตราเร็วเชิงมุม) และ accelerometer (ความเร่ง) จะนำไปใช้โดยตรงเลยก็ได้หรือจะนำไปคำนวนต่อเพื่อหา orientation และ ตำแหน่งได้ ตัวอย่างเช่น ความเร่งในแกน x,y,z สามารถนำไปหามุม pitch และ yaw ได้ ดังอธิบายไว้ในบทความถัดไป หรือแม้กระทั่งยังสามารถนำเอา อัตราเร็วเชิงมุม มาคำนวนร่วมกับ ความเร่งเพื่อหามุม roll pitch yaw
ในบทความนี้ผู้เขียนจึงมาแนะนำวิธีการอ่านค่าจาก เซนเซอร์ทั้ง 2 ตัว
ติดตั้งไลบรารี LSM6DS3
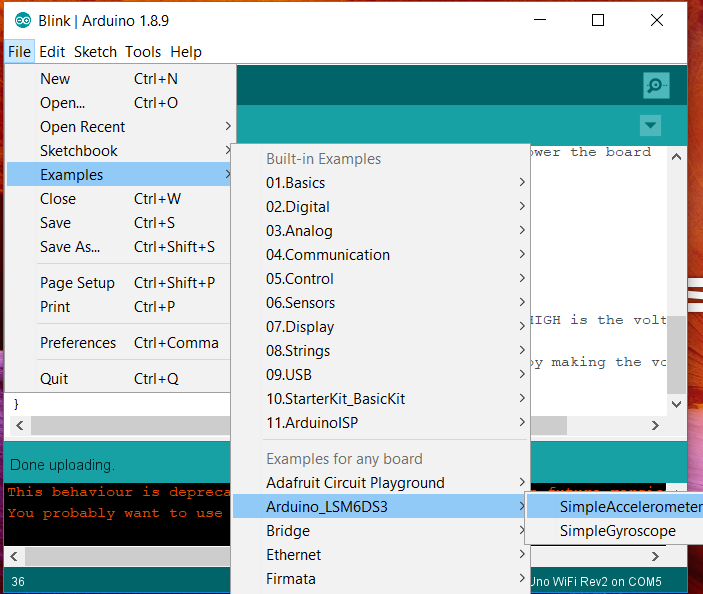
1) ไปที่ Sketch > Include Library > Manage Libraries
2) ในหน้าต่าง Library Manager ในช่อง Type ให้เลือก Arduino / ในช่อง Topic ให้เลือก Sensor / และให้กรอกคำว่า LSM6DS ในกล่องข้อความ จะมีรายการ Arduino_LSM6DS3 by Arduino ปรากฎขึ้น
3) จากนั้นให้คลิกที่รายการนี้และคลิกที่ install เพื่อทำการติดตั้งไลบรารี Arduino_LSM6DS3 หลังจากติดตั้งแล้วให้กดที่ปุ่ม close ด้านล่างของหน้าต่าง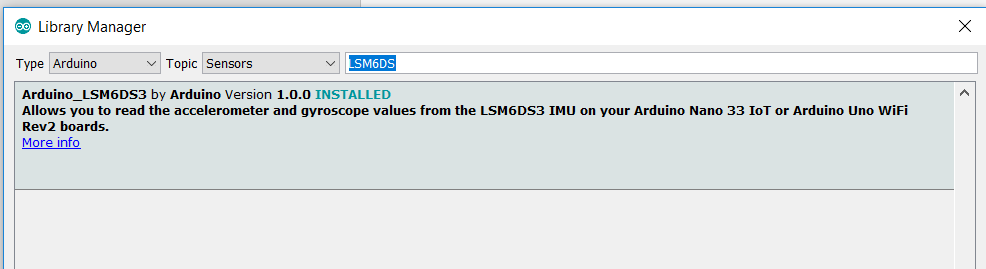
อ่านค่าจาก Gyroscope
7) เปิดโปรแกรม SimpleGyroscope ขึ้น แล้ว Upload ลงบอร์ด จากนั้นเปิด serial monitor ขึ้นเพื่อสังเกตุผล (ค่า rotation rate ที่อ่านได้จาก gyroscope ทั้ง 3 แกน x,y,z)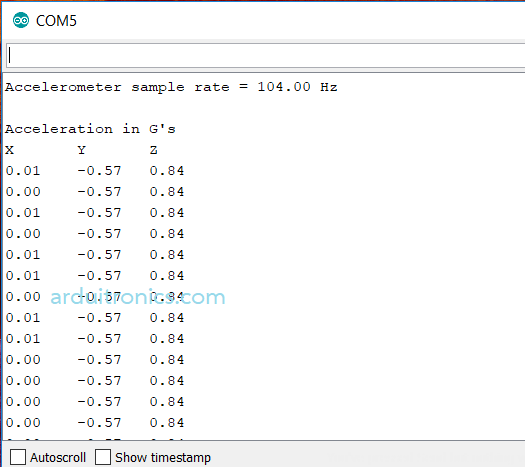
by Pink Panther


หน้านี้เป็นสารบัญของบทความที่ปรากฏในเว็บของ Arduitronics.com นะครับ จะขอแบ่งออกเป็นหัวข้อตามกลุ่มของสินค้าในร้านดังต่อไปนี้
- การลงโปรแกรม
- Raspberry Pi - Media Center (ตอนที่ 1)
- Raspberry Pi - Media Center (ตอนที่ 2)
- Raspberry Pi - How to Cook Raspbian OS
- Raspberry Pi - Connect to the real world : Part 1
- Raspberry Pi -- Connect to the real world GPIO : Part 2
- Raspberry Pi กับ Shield ของ Arduino
- Raspberry Pi - Analog Input with ADC (MCP3208)
- การลงโปรแกรมและไลบรารี่
- เรื่องของบอร์ด Arduino และ การใช้งานบอร์ด
- โมดูลเพื่อวัดค่าจากสิ่งแวดล้อม
- การใช้งาน PM 2.5 Sensor กับ UNO R3 (ตอนที่ 1)
- Arduino Uno Wifi Rev2 (คำนวนมุม Roll และ Pitch จากค่าความเร่งที่วัดได้จาก Accelerometer)
- Arduino Uno Wifi Rev2 (อ่านค่า gyro และ accelerometer ที่ติดมากับบอร์ด)
- การใช้งาน Arduino Uno WiFi (ตอนที่ 1)
- การใช้งาน Arduino Uno WiFi (ตอนที่ 2)
- การใช้งาน DHT11 Humitdity and Temperature Sensor กับบอร์ด Arduino
- Ultrasonic Ranging Module HC-SR04
- Inertial Sensors: หามุม Pitch และ Roll จากเซ็นเซอร์วัดความเร่ง
- Real Time Clock DS3231
- Moisture Sensor on Arduino and Android over Bluetooth
- Moisture Sensor on Arduino and Android over Bluetooth: Part 2
- I2C Communication: Case study of GY-30 (Ambient Light Sensor)
- Inertial Measurement Unit - GY-80 Module for Arduino: Part 1 ADXL345
- Inertial Measurement Unit - GY-80 Module for Arduino: Part 2 L3G4200D
- โมดูลสื่อสาร
- การใช้งาน Motor และ Relay
- การแสดงค่าต่างๆ (แสง สี เสียง จอ)
- โมดูลเพื่อการบันทึกค่าและส่งค่า
- เรื่องของสัญญาณ
- เรื่องของ GPS และการประยุกต์ใช้
- เรื่องทั่วไปเกี่ยวกับ Arduino


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
