

ลดทอนสัญญาณรบกวนแบบง่ายๆ
หลายคนคงเคยใช้เซ็นเซอร์จำพวก Infrared sensor, ultrasonic sensor, temperature sensor, sound sensor, light sensor, inertial sensor, current sensor ในโครงงาน arduino ที่เกี่ยวข้องกับการตรวจวัดและสำรวจสภาพแวดล้อมต่างๆ หรืออาจจะเป็นงานที่ต้องมีการโต้ตอบกับสิ่งรอบข้าง
แต่ทราบกันไหมครับว่าสัญญาณที่ได้จากเซ็นเซอร์เหล่านี้ล้วนแล้วแต่มีสัญญาณรบกวนติดมาด้วยทั้งสิ้น สัญญาณรบกวนนี้เองหากไม่กำจัดหรือทำการลดทอนลงจะทำให้ค่าที่เราทำการคำนวณมีความคลาดเคลื่อนจะมากน้อยขึ้นอยู่กับปริมาณสัญญาณรบกวนที่หลุดเข้ามาในระบบนั้นเอง
บทความนี้นำเสนอขั้นตอนง่ายๆในการลดทอนสัญญาณรบกวนที่ทำได้ในซอฟแวร์ด้วยโค๊ดแค่ไม่กี่บรรทัดโดยไม่ต้องต่อวงจรเพิ่มเติม สามารถเขียนฟังชันลดทอนสัญญาณรบกวนแบบลูปได้ตามสูตร y(n)=(1-a)*x(n)+a*y(n-1) โดยที่ y(n) คือ สัญญาณที่ทำการฟิลเตอร์แล้วของลูปล่าสุด y(n-1) คือสัญญาณที่ถูกฟิลเตอร์แล้วแต่ว่าเป็นของลูปที่แล้ว ส่วน x(n) คือสัญญาณที่วัดได้ของลูปล่าสุด และ a คือค่าคงที่ของฟิลเตอร์ (มีค่าระหว่าง 0 ถึง 1) ถ้าใครไม่ทราบว่าจะให้ a มีค่าเท่าไร อาจจะเริ่มจา a=0.95 ก่อนก็ได้ แล้วค่อบปรับจูนค่าตามความหมาะสมหลังจากดูผลการรันแล้ว ดูข้อมูลเพิ่มเติมเกี่ยวกับค่าคงที่นี้ได้ที่ Link
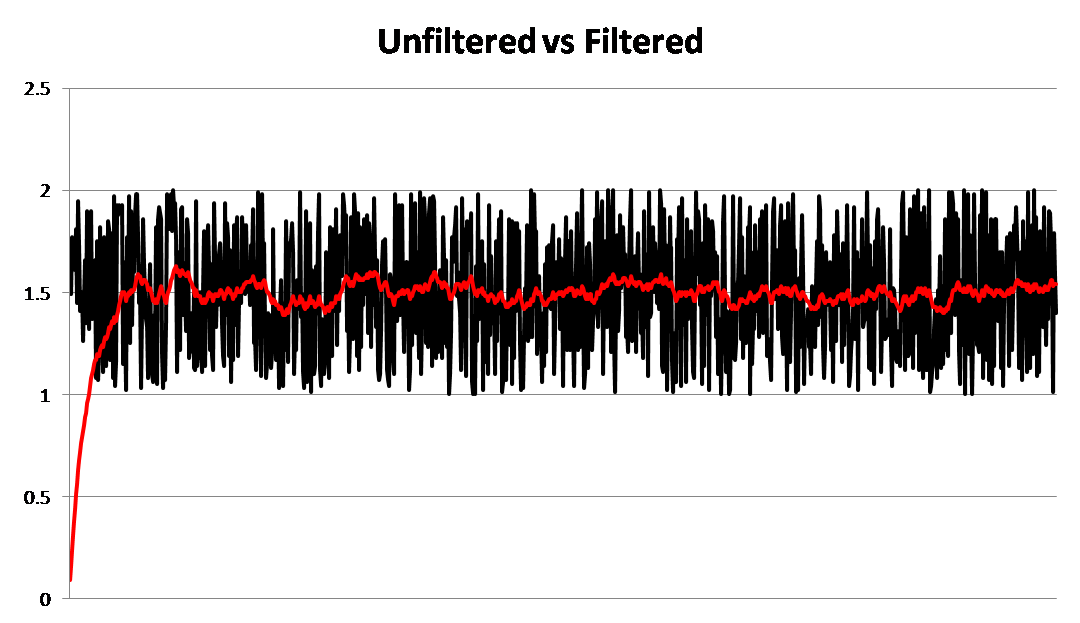
ใครอยากทดสอบประสิทธิภาพของวิธีนี้สามารถทดลองได้ตามโค๊ดด้านล่างซึ่งเป็นการจำลองสถานการณ์ว่าบอร์ดได้ต่อกับเซ็นเซอร์และรับสัญญาณที่มีสัญญาณรบกวนติดเข้ามาด้วย โดยใช้ a = 0.95 และค่าเบี่ยงเบนของสัญญาณรบกวนมีค่าเท่ากับหนึ่ง
|
int counter = 0; float randNumber = 0.0; float newVal = 0.0; float dcBias = 1.0; float simulatedVal = 0.0; float filterConstant = 0.95; // filter constant // the setup routine runs once when you press reset: void setup() { Serial.begin(9600); randomSeed(100); } void loop() { counter ++; // กำหนดให้หยุดการแสดงผลใน serial monitor ที่ 1000 ลูป if (counter <= 1000) { // สร้างสัญญาณรบกวนที่มีค่าเบี่ยงเบนมาตรฐานเท่ากับ 1 randNumber = (float) random(0,1000)/1000; // แสดงผล column ที่ 1 คือ ครั้งที่ column ที่ 2 คือ ค่าสัญญาณที่มี nosie // column ที่ คือค่าที่ถูก filter แล้ว Serial.println("\t"); Serial.print(counter, DEC); Serial.print("\t"); Serial.print(simulatedVal); Serial.print("\t"); Serial.print(newVal); Serial.print("\t"); Serial.print(""); } // สร้างสัญญาณที่รับมาจาก sensor simulatedVal = dcBias + randNumber; // เรียกใช้ฟังชัน lowpass filter newVal = smooth(simulatedVal, filterConstant, newVal); delay(100); } // ฟังชั่น smooth หรือ lowpass filter float smooth(float data, float filterVal, float smoothedVal){ smoothedVal = (data * (1 - filterVal)) + (smoothedVal * filterVal); return smoothedVal; } |
โดยผลที่ได้หากนำมาพล็อตเป็นกราฟจะได้ตามรูปด้านล่าง กราฟสีดำเป็นสัญญาณจากเซ็นเซอร์ที่มีสัญญาณรบกวนติดมาด้วยส่วนกราฟแดงเป็นสัญญาณที่ถูกทำการฟิลเตอร์แล้วซึ่งจะเห็นว่าสามารถลดสัญญาณรบกวนไปได้เยอะพอสมควร
By "Pink Panther"


หน้านี้เป็นสารบัญของบทความที่ปรากฏในเว็บของ Arduitronics.com นะครับ จะขอแบ่งออกเป็นหัวข้อตามกลุ่มของสินค้าในร้านดังต่อไปนี้
- การลงโปรแกรม
- Raspberry Pi - Media Center (ตอนที่ 1)
- Raspberry Pi - Media Center (ตอนที่ 2)
- Raspberry Pi - How to Cook Raspbian OS
- Raspberry Pi - Connect to the real world : Part 1
- Raspberry Pi -- Connect to the real world GPIO : Part 2
- Raspberry Pi กับ Shield ของ Arduino
- Raspberry Pi - Analog Input with ADC (MCP3208)
- การลงโปรแกรมและไลบรารี่
- เรื่องของบอร์ด Arduino และ การใช้งานบอร์ด
- โมดูลเพื่อวัดค่าจากสิ่งแวดล้อม
- การใช้งาน PM 2.5 Sensor กับ UNO R3 (ตอนที่ 1)
- Arduino Uno Wifi Rev2 (คำนวนมุม Roll และ Pitch จากค่าความเร่งที่วัดได้จาก Accelerometer)
- Arduino Uno Wifi Rev2 (อ่านค่า gyro และ accelerometer ที่ติดมากับบอร์ด)
- การใช้งาน Arduino Uno WiFi (ตอนที่ 1)
- การใช้งาน Arduino Uno WiFi (ตอนที่ 2)
- การใช้งาน DHT11 Humitdity and Temperature Sensor กับบอร์ด Arduino
- Ultrasonic Ranging Module HC-SR04
- Inertial Sensors: หามุม Pitch และ Roll จากเซ็นเซอร์วัดความเร่ง
- Real Time Clock DS3231
- Moisture Sensor on Arduino and Android over Bluetooth
- Moisture Sensor on Arduino and Android over Bluetooth: Part 2
- I2C Communication: Case study of GY-30 (Ambient Light Sensor)
- Inertial Measurement Unit - GY-80 Module for Arduino: Part 1 ADXL345
- Inertial Measurement Unit - GY-80 Module for Arduino: Part 2 L3G4200D
- โมดูลสื่อสาร
- การใช้งาน Motor และ Relay
- การแสดงค่าต่างๆ (แสง สี เสียง จอ)
- โมดูลเพื่อการบันทึกค่าและส่งค่า
- เรื่องของสัญญาณ
- เรื่องของ GPS และการประยุกต์ใช้
- เรื่องทั่วไปเกี่ยวกับ Arduino


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
