
Motor Drive Module (BTS7960) - 43A with H-Bridge






| รหัสสินค้า | AG00143 |
| หมวดหมู่ | Motor Drive / Shield |
| ราคา | 199.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |

รายละเอียดสินค้า
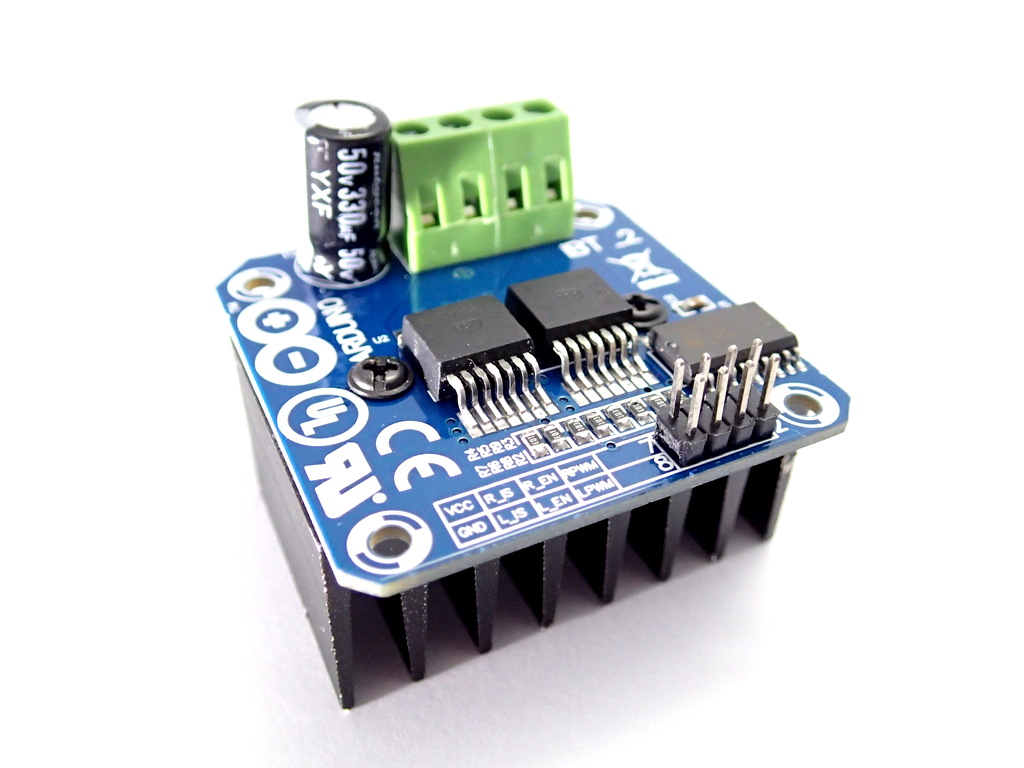
IBT-2 (BTS7960) เป็นโมดูลขนาดกระทัดรัดสำหรับขับ Motor (PWM at 25kHz ร่วมกับ active freewheeling) เหมาะสำหรับควบคุม High Power Motor โดยทำงานที่ 24V และสามารถขับได้ที่กระแสสูงสุดถึง 43A ที่มาพร้อมกับ Protection ต่างๆไม่ว่าจะเป็น Over-Voltage, Under-Voltage, Over-Temperature
ตัวอย่างการใช้งานกับ Arduino: Click
DESCRIPTION:
The IBT-2 is a fully integrated high current H bridge for motor drive applications using the Infineon BTS7960 high current half bridge. the BTS7960 is part of the NovalithICTM family containing one p-channel highside MOSFET and one n-channel lowside MOSFET with an integrated driver IC in one package. Due to the p-channel highside switch the need for a charge pump is eliminated thus minimizing EMI.
Interfacing to a microcontroller is made easy by the integrated driver IC which features logic level inputs, diagnosis with current sense, slew rate adjustment, dead time generation and protection against overtemperature, overvoltage, undervoltage, overcurrent and short circuit.
The IBT-2 provides a cost optimized solution for protected high current PWM motor drives with very low board space consumption.
SPECIFICATIONS:
- Operating Voltage 5.5 to 27V (B+)
- Path resistance of typ. 16 mOhm at 25°C
- Low quiescent current of typ. 7 uA at 25°C
- PWM capability of up to 25 kHz combined with active freewheeling
- Switched mode current limitation for reduced power dissipation in overcurrent
- Current limitation level of 43 A typ.
- Status flag diagnosis with current sense capability
- Overtemperature shut down with latch behaviour
- Overvoltage lock out
- Undervoltage shut down
- Driver circuit with logic level inputs
- Adjustable slew rates for optimized EMI
- 74AHC244 Schmitt-trigger Octal buffer/line driver for ESD protection (Inputs accepts voltages higher than VCC)
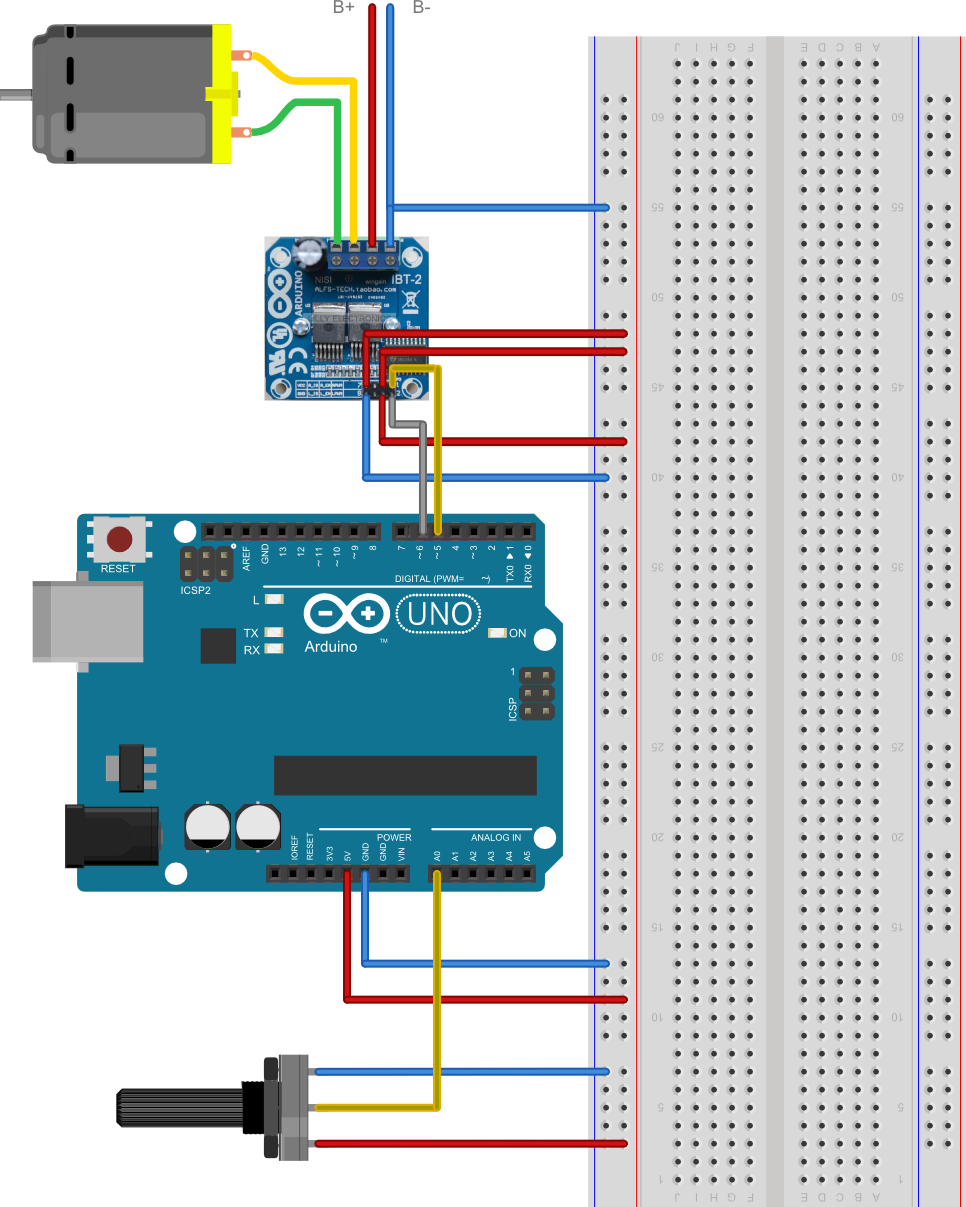
ตัวอย่างการใช้งาน บอร์ด Arduino ร่วมกับ Potentiometer เพื่อที่จะขับ IBT-2 โดยการ full reverse speed จนถึง full forward speed
Arduino sketch:
|
|
/*
IBT-2 Motor Control Board driven by Arduino.
Speed and direction controlled by a potentiometer attached to analog input 0.
One side pin of the potentiometer (either one) to ground; the other side pin to +5V
Connection to the IBT-2 board:
IBT-2 pin 1 (RPWM) to Arduino pin 5(PWM)
IBT-2 pin 2 (LPWM) to Arduino pin 6(PWM)
IBT-2 pins 3 (R_EN), 4 (L_EN), 7 (VCC) to Arduino 5V pin
IBT-2 pin 8 (GND) to Arduino GND
IBT-2 pins 5 (R_IS) and 6 (L_IS) not connected
*/
int SENSOR_PIN = 0; // center pin of the potentiometer
int RPWM_Output = 5; // Arduino PWM output pin 5; connect to IBT-2 pin 1 (RPWM)
int LPWM_Output = 6; // Arduino PWM output pin 6; connect to IBT-2 pin 2 (LPWM)
void setup()
{
pinMode(RPWM_Output, OUTPUT);
pinMode(LPWM_Output, OUTPUT);
}
void loop()
{
int sensorValue = analogRead(SENSOR_PIN);
// sensor value is in the range 0 to 1023
// the lower half of it we use for reverse rotation; the upper half for forward rotation
if (sensorValue < 512)
{
// reverse rotation
int reversePWM = -(sensorValue - 511) / 2;
analogWrite(LPWM_Output, 0);
analogWrite(RPWM_Output, reversePWM);
}
else
{
// forward rotation
int forwardPWM = (sensorValue - 512) / 2;
analogWrite(LPWM_Output, forwardPWM);
analogWrite(RPWM_Output, 0);
}
}
|
ใน Diagram ด้านล่าง B+ และ B- ด้านบนของรูป คือ power supply สำหรับ motor. ส่วน 5k หรือ 10k potentiometer ใช้ในการควบคุมความเร็ว
วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
