
Gravity: mmWave C4001 24GHz Human Presence Detection Sensor (12 Meters, I2C & UART) - แท้ DFRobot

| รหัสสินค้า | SA11034 |
| หมวดหมู่ | LIDAR / เซ็นเซอร์วัดระยะทาง / ความเร็ว Distance / Speed |
| ราคา | 785.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

รายละเอียดสินค้า
ดูรายละเอียดการใช้งานและตัวอย่าง code ได้ที่ Click
Introduction
The Gravity: C4001 millimeter-wave presence sensor, operating at a wavelength signal of 24GHz, boasts a horizontal detection range of 100°, a presence detection range of 8 meters, and a motion detection and ranging range of 12 meters. It utilizes the Gravity interface (PH2.0) and supports I2C and UART communication methods, compatible with Arduino, Raspberry Pi, ESP32 / ESP8266 development boards. Perfect for human presence detection, environmental monitoring, and real-time monitoring projects.
Human detection
Compared to other types of human presence sensors, such as infrared sensors, the C4001 (12m) millimeter wave presence sensor has the advantage of detecting both static and moving objects. It also has a relatively strong anti-interference ability, making it less susceptible to factors such as temperature changes, variations in ambient light, and environmental noise. Whether a person is sitting, sleeping, or moving, the sensor can quickly and sensitively detect their presence.

The differences between millimeter-wave presence sensor and infrared sensor
Distance and velocity detection
The C4001 (12m) millimeter wave presence sensor utilizes FMCW modulation for distance and speed measurement. It has a maximum detection range of 12 meters and a speed measurement range of 0.1 to 10 meters per second.
FMCW (Frequency Modulated Continuous Wave) is a type of radar system based on frequency modulation of continuous wave signals. Unlike traditional pulse radar, FMCW radar continuously emits a series of continuous wave signals with gradually changing frequencies while simultaneously receiving the reflected signals. By analyzing the received signals, measurements of parameters such as distance, speed, and angle can be achieved.
Compared to traditional pulse radar technology, FMCW radar can continuously measure the distance of an object. By utilizing the Doppler effect, it can also obtain information about the velocity of the target object. This makes FMCW radar suitable for applications that require tracking the movement of objects. Additionally, FMCW radar can achieve continuous frequency scanning, providing higher measurement resolution. Since it does not require waiting for the return of echo signals, FMCW radar is suitable for applications that require real-time monitoring and tracking of target objects.

Detection Range of millimeter-wave human body sensor
What is a millimeter-wave radar sensor?
Millimeter-wave radar technology is a non-contact sensing technology used to detect objects and provide information about their distance, velocity, and angle (in the case of humans, for example). The signals emitted by millimeter-wave sensors fall within the high-frequency spectrum with wavelengths between 24GHz and 300GHz, also known as the millimeter (mm) range.
Installation Method
The millimeter-wave human body sensor is sensitive to the installation method, and improper installation can affect the performance and functionality of the sensor. The commonly used installation methods for this module include top installation, bottom installation, horizontal installation, and downward tilted installation.

Top Installation Diagram of millimeter-wave human body sensor

Bottom Installation of millimeter-wave human body sensor

Horizontal Installation of millimeter-wave human body sensor

Wiring diagram of millimeter-wave human body sensor and Arduino Uno
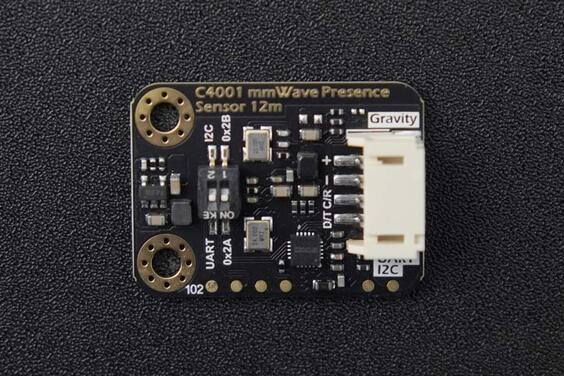
Features - Communication Methods: It supports two communication methods, I2C and UART.
- Interface: It uses the Gravity interface (PH2.0).
- Human Detection: It can detect the presence of humans up to 8 meters and detect human motion up to 12 meters.
- Distance Detection: It can measure distances from 1.2m to 12m.
- Speed Detection: It can detect speeds from 0.1m/s to 10m/s.
- Strong anti-interference capability: It is not affected by factors such as snow, haze, temperature, humidity, dust, light, and noise.
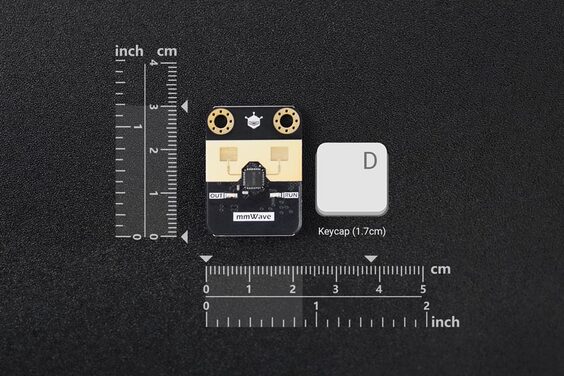
- Compact size and easy integration.
- Human Detection
- Distance and Velocity Detection
- Environmental Monitoring
- Industrial Automation
- Real-time Monitoring and Tracking
- Operating Voltage: 3.3V/5V
- Maximum Detection Range: 12m
- Beam Angle: 100*80°
- Modulation Mode: FMCW
- Operating Frequency: 24GHz
- Operating Temperature: -40~85℃
- Baud Rate: 9600
- I2C Address: 0x2A/0x2B
- Size: 22*30mm
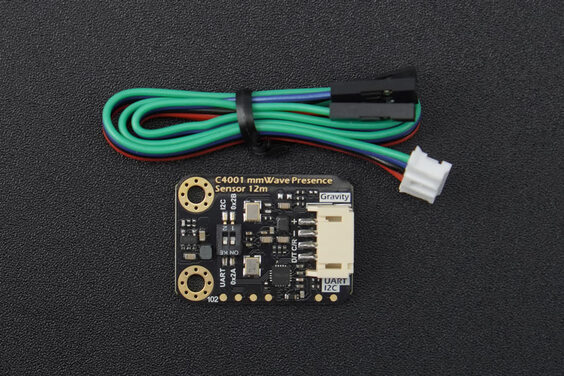
Shipping List
- Gravity: mmWave 24GHz Human Presence Detection Sensor (12 Meters, I2C & UART) x1
- Gravity-4P I2C/UART Sensor Connector x1
Demo Program
Information Retrieval in UART Communication
Preparation
-
Hardware
- C4001 Millimeter Wave Presence Sensor 12m
- Arduino Uno
-
Software
Arduino IDE,Click to download Arduino IDE
DFRobot_C4001 library,Click to download the DFRobot_C4001 library.
Wiring diagram

| mmWave | Arduino Uno |
|---|---|
| VIN | 5V |
| GND | GND |
| C/R | D5 |
| D/T | D4 |
Sample code
Please switch the DIP switch on the back of the sensor to the UART direction, and copy the following code to your Arduino IDE and upload it.
Result
IIC communication distance speed acquisition
Preparation
-
Hardware
- C4001 Millimeter Wave Presence Sensor 12m
- Arduino Uno
-
Software
Arduino IDE,Click to download Arduino IDE
DFRobot_C4001 library,Click to download the DFRobot_C4001 library.
Wiring diagram

Sample code
Copy the following code and upload it to your Arduino IDE。
Result
result
วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
ร้านArduitronics
/www.arduitronics.com/
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ
MEMBER
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม