
Futaba S3003 Servo Motor (180 Degree)












รายละเอียดสินค้า
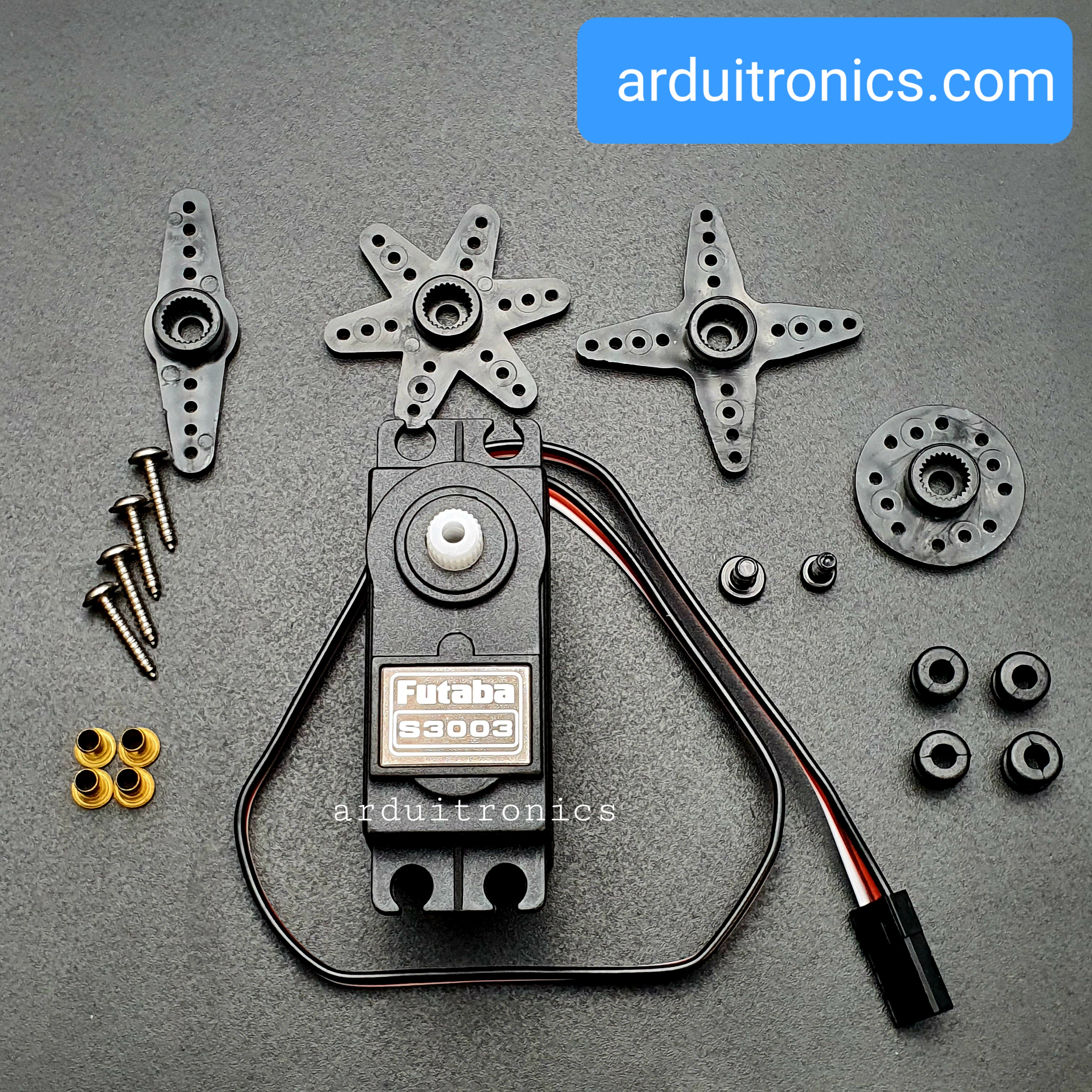
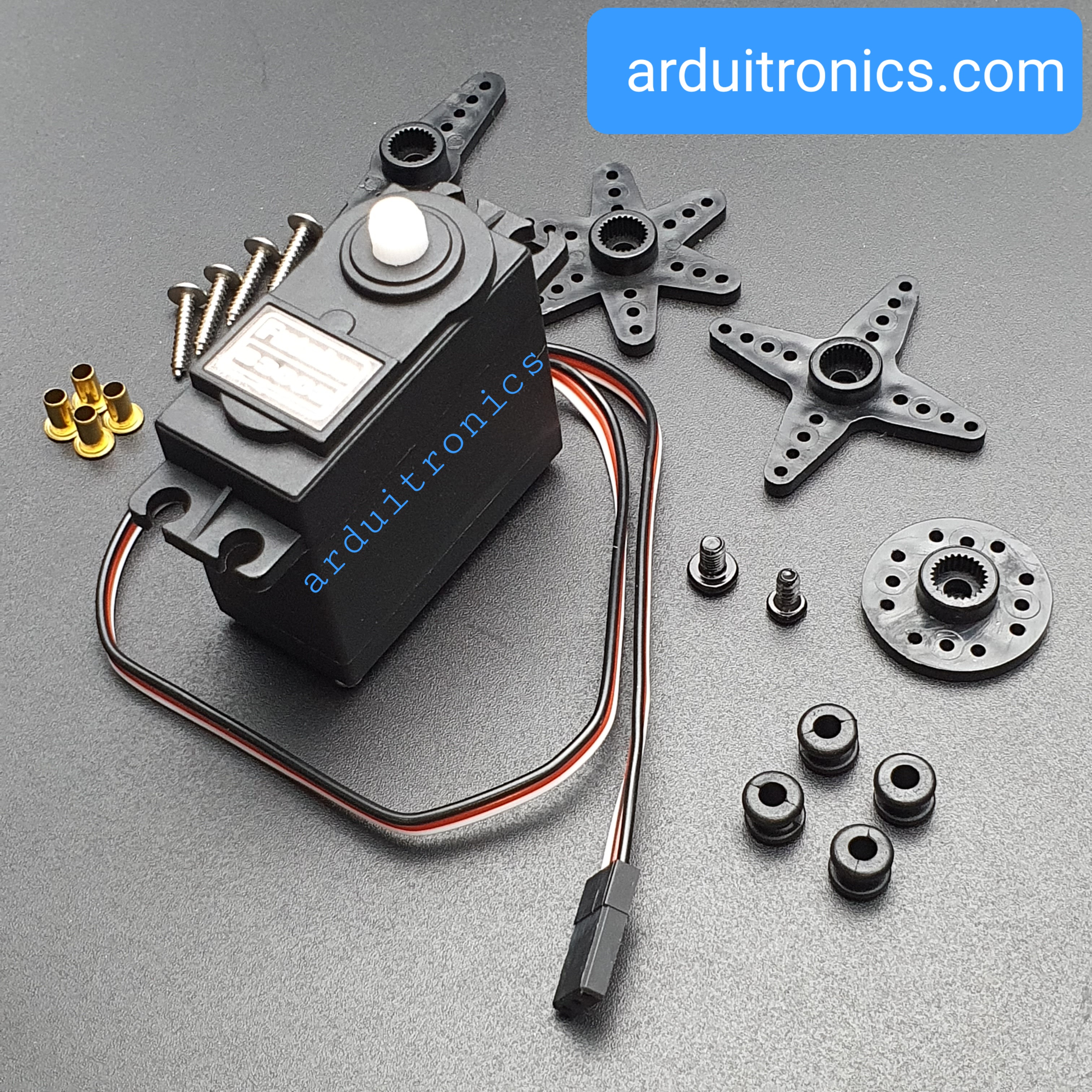
Futaba S3003 Servo
Servo motor ของ Futaba สำหรับใช้งานกับเครื่องบินบังคับ รถบังคับ เรือ หรือ หุ่นยนต์ครับ ของดีครับทางร้านทดสอบแล้ว การควบคุมองศาการหมุนเป็นไปอย่างนุ่มนวล รุ่นนี้เฟืองภายในเป็นพลาสติกนะครับ
S3003 servos durable casing, three kilograms of torque! Compatible with the brand receiver. Speed, torque, high accuracy, complete accessories (including photographs did not shoot accessories: screws, set screws, damping pads). For Cars, ship model, robotics, mechanical arm, etc.
Technical parameters:
Futaba S3003 Standard Servo, used on cars, boats and other remote control model.
Alternative Futaba of S138, S148, S22, S38 and S12.
Parameters:
Speed: 0.23 seconds / 60 degrees (4.8V) and 0.19 sec / 60 degrees (6V)
Torque: 3.2 kg / cm (4.8V) and 4.1 kg / cm (6V)
ตัวอย่างการใช้งาน S3003 Servo motor 38g S3003 Standard Servo
Servo motor มีไฟอยู่ 3 เส้น สีแดงไฟบวก สีดำกราวน์ สีขาวสายสัญญาณ ต่อวงจรตามภาพ อัพโหลดโคดนี้ลงไป ใช้งานได้แล้ว จากโคดนี้สามารถสั่งหมุน Servo เป็นมุม โดยหมุนได้ 0-179 องศา

// ข้อมูลเพิ่มเติมจากเว็บไซต์ http://arduino.cc/en/Tutorial/Knob
#include
Servo myservo; // สร้านออปเจ็กชื่อ myservo จากคลาส Servo เพื่อควบคุม servo
int potpin = 0; // ขาอะนาล็อกใช้ต่อกับตัวต้านทานปรับค่าได้
int val; // ใช้เก็บค่าที่อ่านได้จากตัวต้านทานปรับค่าได้
void setup()
{
myservo.attach(9); // บอกว่าจะต่อ servo ที่ขา 9
}
void loop()
{
val = analogRead(potpin); // อ่านค่าอะนาล็อกจากตัวต้านทานปรับค่าได้
val = map(val, 0, 1023, 0, 179); // แปลงช่วง 0-1023 ที่อ่านได้ ให้อยู่ในช่วง 0-179
myservo.write(val); // ส่งค่าไปควบคุม servo เป็นมุมที่ต้องการในช่วง 0-179 องศา
delay(15); // หน่วงเวลาให้ servo ได้ทำงาน
}
ตัวอย่างการใช้งาน โดยอ่านค่า จาก analog แล้วแปลงเป็นมุมสั่งให้ servo หมุน
วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
