
IP68 Underwater Ultrasonic Obstacle Avoidance Sensor (3m, UART) - แท้ DFRobot





| รหัสสินค้า | AS00596 |
| หมวดหมู่ | LIDAR / เซ็นเซอร์วัดระยะทาง / ความเร็ว Distance / Speed |
| ราคา | 1,850.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |

รายละเอียดสินค้า
ดูรายละเอียดการใช้งานและตัวอย่าง arduino code ได้ที่ Click
Introduction
หมายเหตุ: เซ็นเซอร์นี้ต้องใช้ใต้น้ำเท่านั้น จำเป็นต้องมีน้ำเป็นสื่อกลางเพื่อให้วัดได้แม่นยำ
With an IP68 protection rating, this sensor can replace a camera for obstacle avoidance and meet the requirements of normal underwater navigation speeds. By using this obstacle avoidance sensor, underwater vehicles can achieve true "unmanned driving" without the need for human observation. Even at a depth of 10m, obstacle avoidance can still be easily accomplished.

Thanks to its small size and minimal blind spots, this sensor takes up minimal space and can be easily integrated into various projects.

Specification
- Measurement Range: 2-300cm
- Measurement Accuracy: ±(0.5+S*0.5%)cm@<2m, ±(1+S*1%)cm@>2m
- Operating Voltage: 5-24V
- Standby Current: ≤1mA
- Operating Current: ≤10mA
- Output Mode: UART controlled
- Power-on Startup Time: ≤500ms
- Output Response Time: 10ms
- Angle: 5-10°
- Operating Temperature: -15~50°C
- Storage Temperature: -25~80°C
- Storage Humidity: 65%~90% RH (non-condensing)
Features
- Compact in size, with a small blind zone
- Lightweight and fast response time
- Waterproof level of IP68
Document:
Shipping List:
- Underwater Ultrasonic Obstacle Avoidance Sensor (3m) x1
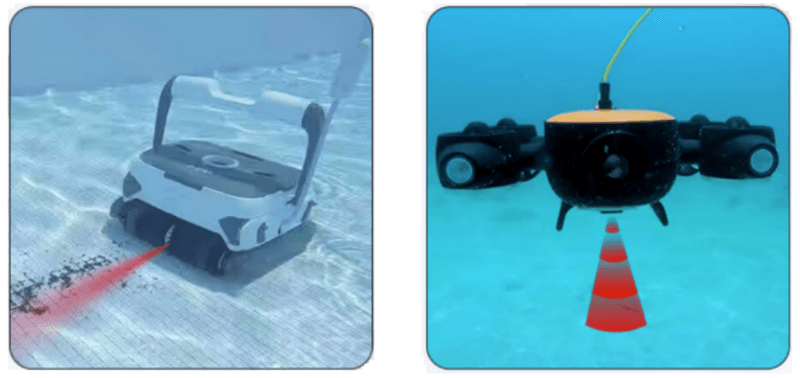
Applications
- Underwater robot obstacle avoidance and self-control detection
- Measurement of water depth by underwater robots
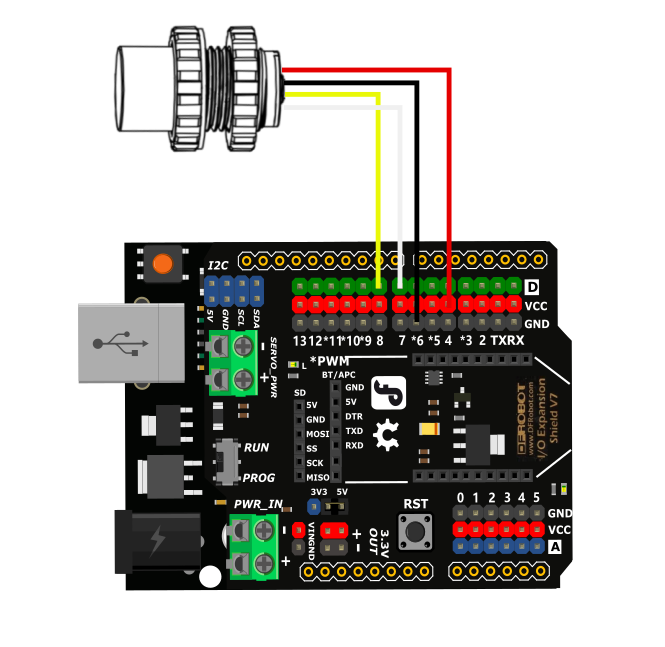
Board Overview
| Num | Label | Description |
|---|---|---|
| Red line | VCC | power supply input positive pole |
| Black line | GND | power ground wire |
| Yellow line | RX | UART receiving data line |
| white line | TX | UART transmitting data line |
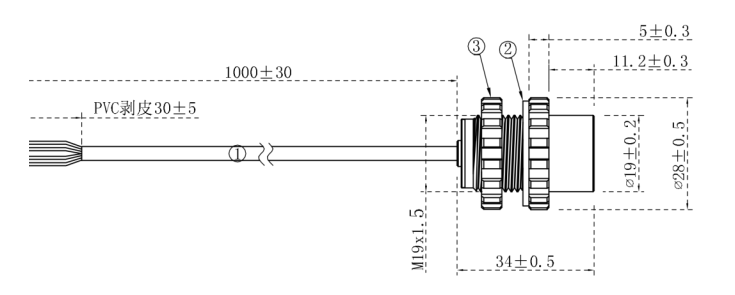
Dimensional Drawing
Output Format
1、communication instructions
| Interface | Baud rate | Data bit | Stop bit | Check bit |
|---|---|---|---|---|
| UART | 115200bps | 8 | 1 | None |
2、Timing diagram
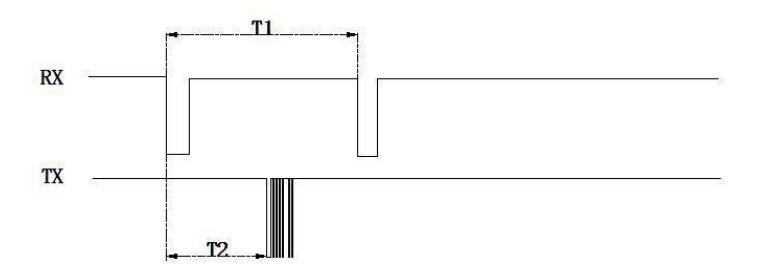
Note: T1 ≥ 19ms; T2 ≈ 13ms
3、UART output format
| Frame data | Output data | Description | Bytes |
|---|---|---|---|
| Frame header | 0XFF | Frame header, fixed as 0XFF | 1 byte |
| H_DATA | 0X07 | Higher 8 bits of distance data | 1 byte |
| L_DATA | 0XA1 | Lower 8 bits of distance data | 1 byte |
| SUM | 0XA7 | data checksum | 1 byte |
SUM= (header+Data_H+ Data_L)&0x00FF
=(0XFF + 0X07 + 0XA1)&0x00FF
=0XA7;
Distance value = DATA_ H * 256+DATA_L = 0x07A1;
Decimal conversion is equal to 1953;
Tutorial
Requirements
- Hardware
- DFRduino UNO R3 (or similar) x 1
- Ultrasonic Ranging Sensor(3m) x1
- Software
Connection Diagram
Note: the sensor needs to be put into water to get data, otherwise the output distance value is 0
Sample Code
Results: Put the sensor into the water, and if there is an obstacle in front, the distance between the sensor and the obstacle will be printed by serial port.

วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
