
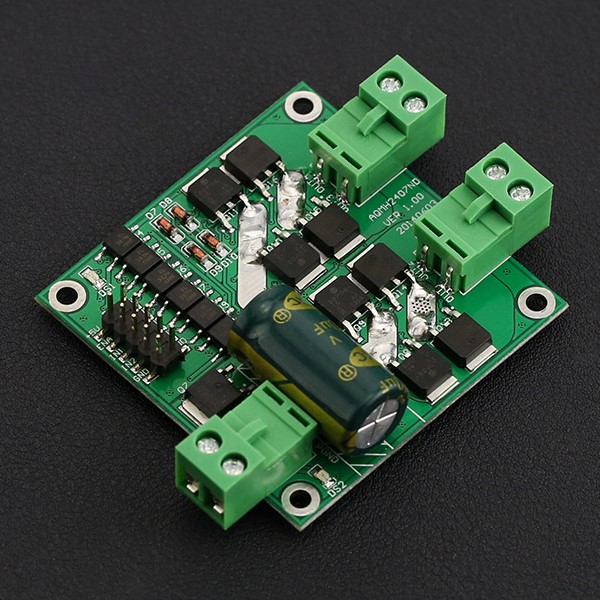
2x7A DC Motor Driver (แท้จาก DFRobot)
| รหัสสินค้า | AG00761 |
| หมวดหมู่ | Motor Drive / Shield |
| ราคา | 985.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |

รายละเอียดสินค้า
Description:
This is an ultra small Dual DC motor driver for some room limited projects. UVLO (Under Voltage Latch-Out) features a safe guard for your system. It is very considerate to own an Photo Coupler isolation for all the signals in case of that the motor's Reverse Current would interfere the control signals. Besides all, all the interfaces includes ESD (electro-static discharge) protection.

Features:
- Voltage supply: DC 7 ~ 24 V
- Voltage supply limit: 6.5 ~ 27 V
- Control signal Level (Compatible 3.3V/5V)
- High: DC 3.0 ~ 6.5 V
- Low: DC0 ~ 0.8 V
- Output Channel: 2
- Control signal current: 3 ~ 11 mA (Each route)
- Maximum continuous operating current: 7 A
- Peak current: 50 A
- Speed control: PWM
- Minimum valid Pulse Width: 5 us
- Working Temperature: -25 ~ 85 °C
- Mounting Hole: M3
- Dimension (Length * Width * Height): 55 x 55(mm)/2.165 x 2.165(in)
- Weight: 32g
Shipping List:
- 7A Dual DC Motor Driver x1
Tutorial
This tutorial will cover how to use PWM to control a motor using the shield. Do the wiring according to the Connection Diagram below, and then upload the sample code below to the Arduino card, here we use a arduino UNO as the controller, you could see your motor run forward for 3 second and then run reversely for another 3 seconds and repeat this behavior then.
Requirements
-
Hardware
-
1 x DFRduino UNO (or similar)
-
1 x This 7A Dual DC Motor Driver
-
2 x DC Motor
-
1 x Fuse@20A
-
Jumper wires
-
-
Software
-
Arduino IDE Click to Download Arduino IDE from Arduino®.
-
Connection Diagram


Facility Safety and the Personal Safety: Please add a fuse@20A between the Power source and this shield.
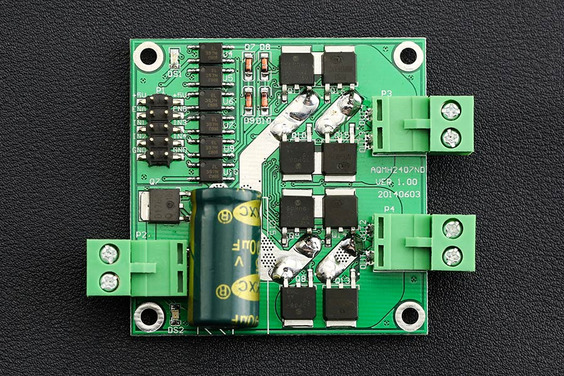
Installation Tips
The backside of the driver, as right-hand picture shows, that its conducting layer can be very wide, so you should take some measurements to ensure it won't short-circuit, like applying 1mm layer conductive epoxy or any other similar materials.
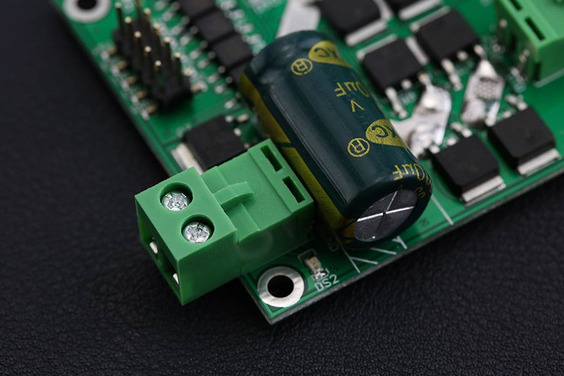
Pluggable Connector
You may find that the connector is designed as pluggable type to adapt with Male or Female wires.

Sample Code
วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
