
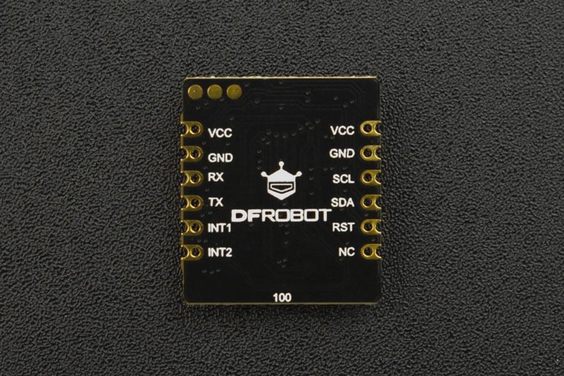
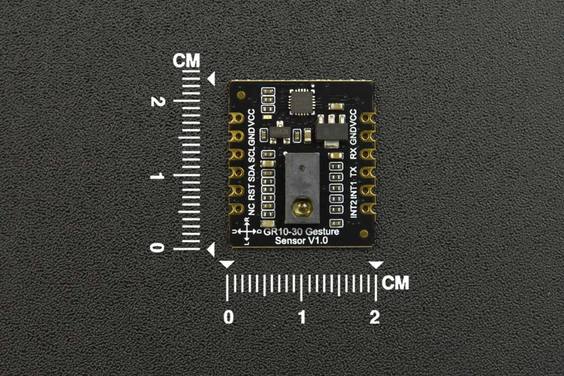
Fermion: GR10-30 Gesture Sensor (Breakout, UART & I2C, 12 Gestures, 0~30cm) - แท้ DFRobot

| รหัสสินค้า | AS00557 |
| หมวดหมู่ | ตรวจจับท่าทางการขยับของมือ Gesture Sensor Module |
| ราคา | 1,200.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |

รายละเอียดสินค้า
INTRODUCTION

Connection Diagram
Features:
- Maximum recognition distance of 30cm
-
Capable of recognizing 12 gestures
-
Configurable recognition threshold & other parameters
-
Support UART & I2C communication
- Gesture Remote Controller
- Robot Interaction
- Human-machine Interface Control
- Supply Voltage: 3.3V to 5V
- Operating Current: <10mA
- I2C Address: 0x73
- Serial Baud Rate: 9600
- Maximum Recognition Distance: 30cm
- Operating Temperature:0℃ to 70℃
- Operating Humidity:5%RH to 85%RH
- Dimension:20.5×23.5mm/0.81×0.93”
Documentation:
- Product wiki
- SEN0543 GR10-30 Register Table (V1.0)
- CAD
- Fermion: GR10-30 Gesture Sensor × 1
- 2.54-6P Black Single-row Pin Connector × 2
Tutorial for Arduino
Requirements
- Hardware
- DFRduino UNO R3 (or similar) x 1
- Fermion: GR10-30 Gesture Sensor x 1
- DuPont Wires
- Software
- Arduino IDE
- RTU Library (Install RTC library when using serial for communication)
- Download and install the GR10-30 library & sample codes (About how to install the library?)
Connection Diagram

Sample Code 1 - Read gesture by polling
Read gesture by polling
Parameter Explanation
- gr10_30.setLeftRange(5);
When the detected hand moves five units to the left, it will be determined as "move left" gesture - gr10_30.setUdlrWin(18, 11);
Set recognition area as 18*11 units - gr10_30.setCwsAngle(4);
Rotating by 90° will be determined as "rotate" gesture- The recognition distance for rotation gestures is about half of the maximum recognition distance.

/*! * @file getGestures.ino * @brief Run the routine to read gesture type * @n * @n connected table * --------------------------------------------------------------------------------------------------------------- * board | MCU | Leonardo/Mega2560/M0 | UNO | ESP8266 | ESP32 | microbit | * VCC | 3.3V/5V | VCC | VCC | VCC | VCC | X | * GND | GND | GND | GND | GND | GND | X | * RX | TX | Serial1 TX1 | 5 | 5/D6 | D2 | X | * TX | RX | Serial1 RX1 | 4 | 4/D7 | D3 | X | * --------------------------------------------------------------------------------------------------------------- * * @copyright Copyright (c) 2021 DFRobot Co.Ltd (http://www.dfrobot.com) * @license The MIT License (MIT) * @author [zhixinliu](zhixinliu@dfrobot.com) * @version V0.1 * @date 2022-07-25 * @url https://github.com/DFRobor/DFRobot_GR10_30 */ #include "DFRobot_GR10_30.h" #if defined(ARDUINO_AVR_UNO)||defined(ESP8266) #include <SoftwareSerial.h> #endif //#define UARTMODE // Serial mode #define I2CMODE // I2C mode #if defined UARTMODE #if defined(ARDUINO_AVR_UNO)||defined(ESP8266) SoftwareSerial mySerial(/*rx =*/4, /*tx =*/5); DFRobot_GR10_30 gr10_30(/*addr =*/GR10_30_DEVICE_ADDR, /*s =*/&mySerial); #else DFRobot_GR10_30 gr10_30(/*addr =*/GR10_30_DEVICE_ADDR, /*s =*/&Serial1); #endif #endif #if defined I2CMODE DFRobot_GR10_30 gr10_30(/*addr = */GR10_30_DEVICE_ADDR, /*pWire = */&Wire); #endif void setup() { #if defined UARTMODE //Init MCU communication serial port #if defined(ARDUINO_AVR_UNO)||defined(ESP8266) mySerial.begin(9600); #elif defined(ESP32) Serial1.begin(9600, SERIAL_8N1, /*rx =*/D3, /*tx =*/D2); #else Serial1.begin(9600); #endif #endif Serial.begin(115200); while(gr10_30.begin() != 0){ Serial.println(" Sensor initialize failed!!"); delay(1000); } Serial.println(" Sensor initialize success!!"); /** Set the gesture to be enabled * GESTURE_UP * GESTURE_DOWN * GESTURE_LEFT * GESTURE_RIGHT * GESTURE_FORWARD * GESTURE_BACKWARD * GESTURE_CLOCKWISE * GESTURE_COUNTERCLOCKWISE * GESTURE_WAVE It is not suggested to enable rotation gesture (CW/CCW) and wave gesture at the same time. * GESTURE_HOVER Disable other gestures when hover gesture enables. * GESTURE_UNKNOWN * GESTURE_CLOCKWISE_C * GESTURE_COUNTERCLOCKWISE_C */ gr10_30.enGestures(GESTURE_UP|GESTURE_DOWN|GESTURE_LEFT|GESTURE_RIGHT|GESTURE_FORWARD|GESTURE_BACKWARD|GESTURE_CLOCKWISE|GESTURE_COUNTERCLOCKWISE|GESTURE_CLOCKWISE_C|GESTURE_COUNTERCLOCKWISE_C); // Use detailed config if enabled; use the default config if not enabled /** * Set the detection window you want, only data collected in the range are valid * The largest window is 31, the configured number represents distance from the center to the top, bottom, left and right * For example, if the configured distance from top to bottom is 30, then the distance from center to top is 15, and distance from center to bottom is also 15 * udSize Range of distance from top to bottom 0-31 * lrSize Range of distance from left to right 0-31 */ // gr10_30.setUdlrWin(30, 30); // gr10_30.setHovrWin(20, 20); /** * Set moving distance that can be recognized as a gesture * Distance range 5-25, must be less than distances of the detection window */ // gr10_30.setLeftRange(10); // gr10_30.setRightRange(10); // gr10_30.setUpRange(10); // gr10_30.setDownRange(10); // gr10_30.setForwardRange(10); // gr10_30.setBackwardRange(10); /** * Set distance of moving forward and backward that can be recognized as a gesture * Distance range 1-15 */ // gr10_30.setForwardRange(10); // gr10_30.setBackwardRange(10); /** * Set wave number that can be recognized * Number range 1-15 */ // gr10_30.setWaveNumber(2); /** * Set hover time that can trigger the gesture * 1-200 10ms-2s Default is 60 600ms */ // gr10_30.setHovrTimer(60); /** * Set rotation angle that can trigger the gesture * count Default is 16 range 0-31 * count Rotation angle is 22.5 * count * count = 16 22.5*count = 360 Rotate 360° to trigger the gesture */ // gr10_30.setCwsAngle(/*count*/16); // gr10_30.setCcwAngle(/*count*/16); /** * Set degrees of continuous rotation that can trigger the gesture * count Default is 4 range 0-31 * count The degrees of continuous rotation is 22.5 * count * For example: count = 4 22.5*count = 90 * Trigger the clockwise/counterclockwise rotation gesture first, if keep rotating, then the continuous rotation gesture will be triggered once every 90 degrees */ // gr10_30.setCwsAngleCount(/*count*/8); // gr10_30.setCcwAngleCount(/*count*/8); } void loop() { if(gr10_30.getDataReady()){ uint16_t gestures = gr10_30.getGesturesState(); if(gestures&GESTURE_UP){ Serial.println("Up"); } if(gestures&GESTURE_DOWN){ Serial.println("Down"); } if(gestures&GESTURE_LEFT){ Serial.println("Left"); } if(gestures&GESTURE_RIGHT){ Serial.println("Right"); } if(gestures&GESTURE_FORWARD){ Serial.println("Forward"); } if(gestures&GESTURE_BACKWARD){ Serial.println("Backward"); } if(gestures&GESTURE_CLOCKWISE){ Serial.println("Clockwise"); } if(gestures&GESTURE_COUNTERCLOCKWISE){ Serial.println("Contrarotate"); } if(gestures&GESTURE_WAVE){ Serial.println("Wave"); } if(gestures&GESTURE_HOVER){ Serial.println("Hover"); } if(gestures&GESTURE_CLOCKWISE_C){ Serial.println("Continuous clockwise"); } if(gestures&GESTURE_COUNTERCLOCKWISE_C){ Serial.println("Continuous counterclockwise"); } } delay(1); }Result

Sample Code 2 - Read gesture by interrupt
Read gesture by interrupt
/*! * @file softGetData.ino * @brief Run the routine and you can use interrupt to read gesture * @n * @n connected table * --------------------------------------------------------------------------------------------------------------- * board | MCU | Leonardo/Mega2560/M0 | UNO | ESP8266 | ESP32 | microbit | * VCC | 3.3V/5V | VCC | VCC | VCC | VCC | X | * GND | GND | GND | GND | GND | GND | X | * RX | TX | Serial1 TX1 | 5 | 5/D6 | D2 | X | * TX | RX | Serial1 RX1 | 4 | 4/D7 | D3 | X | * --------------------------------------------------------------------------------------------------------------- * * @copyright Copyright (c) 2021 DFRobot Co.Ltd (http://www.dfrobot.com) * @license The MIT License (MIT) * @author [zhixinliu](zhixinliu@dfrobot.com) * @version V0.1 * @date 2022-07-25 * @url https://github.com/DFRobor/DFRobot_GR10_30 */ #include "DFRobot_GR10_30.h" #if defined(ARDUINO_AVR_UNO)||defined(ESP8266) #include <SoftwareSerial.h> #endif //#define UARTMODE // Serial mode #define I2CMODE // I2C mode #if defined UARTMODE #if defined(ARDUINO_AVR_UNO)||defined(ESP8266) SoftwareSerial mySerial(/*rx =*/4, /*tx =*/5); DFRobot_GR10_30 gr10_30(/*addr =*/GR10_30_DEVICE_ADDR, /*s =*/&mySerial); #else DFRobot_GR10_30 gr10_30(/*addr =*/GR10_30_DEVICE_ADDR, /*s =*/&Serial1); #endif #endif #if defined I2CMODE DFRobot_GR10_30 gr10_30(/*addr = */GR10_30_DEVICE_ADDR, /*pWire = */&Wire); #endif volatile uint8_t interruptFlag = 0; void myInterrupt(void) { interruptFlag = 1; // Interrupt flag #if defined(ESP32) || defined(ESP8266) || defined(ARDUINO_SAM_ZERO) detachInterrupt(13); // Detach interrupt #else detachInterrupt(0); // Detach interrupt #endif } void setup() { #if defined UARTMODE //Init MCU communication serial port #if defined(ARDUINO_AVR_UNO)||defined(ESP8266) mySerial.begin(9600); #elif defined(ESP32) Serial1.begin(9600, SERIAL_8N1, /*rx =*/D3, /*tx =*/D2); #else Serial1.begin(9600); #endif #endif Serial.begin(115200); while(gr10_30.begin() != 0){ Serial.println(" Sensor initialize failed!!"); delay(1000); } Serial.println(" Sensor initialize success!!"); /** Set the gesture to be enabled * GESTURE_UP * GESTURE_DOWN * GESTURE_LEFT * GESTURE_RIGHT * GESTURE_FORWARD * GESTURE_BACKWARD * GESTURE_CLOCKWISE * GESTURE_COUNTERCLOCKWISE * GESTURE_WAVE It is not suggested to enable rotation gesture (CW/CCW) and wave gesture at the same time. * GESTURE_HOVER Disable other gestures when hover gesture enables. * GESTURE_UNKNOWN * GESTURE_CLOCKWISE_C * GESTURE_COUNTERCLOCKWISE_C */ gr10_30.enGestures(GESTURE_UP|GESTURE_DOWN|GESTURE_LEFT|GESTURE_RIGHT|GESTURE_FORWARD|GESTURE_BACKWARD|GESTURE_CLOCKWISE|GESTURE_COUNTERCLOCKWISE|GESTURE_CLOCKWISE_C|GESTURE_COUNTERCLOCKWISE_C); // Use detailed config if enabled; use the default config if not enabled /** * Set the detection window you want, only data collected in the range are valid * The largest window is 31, the configured number represents distance from the center to the top, bottom, left and right * For example, if the configured distance from top to bottom is 30, then the distance from center to top is 15, and distance from center to bottom is also 15 * udSize Distance from top to bottom distance range 0-31 * lrSize Distance from left to right distance range 0-31 */ // gr10_30.setUdlrWin(30, 30); // gr10_30.setHovrWin(20, 20); /** * Set moving distance that can be recognized as a gesture * Distance range 5-25, must be less than distances of the detection window */ // gr10_30.setLeftRange(10); // gr10_30.setRightRange(10); // gr10_30.setUpRange(10); // gr10_30.setDownRange(10); // gr10_30.setForwardRange(10); // gr10_30.setBackwardRange(10); /** * Set distance of moving forward and backward that can be recognized as a gesture * Distance range 1-15 */ // gr10_30.setForwardRange(10); // gr10_30.setBackwardRange(10); /** * Set wave number that can be recognized * Number range 1-15 */ // gr10_30.setWaveNumber(2); /** * Set hover time that can trigger the gesture * 1 - 200 10ms-2s default is 60 600ms */ // gr10_30.setHovrTimer(60); /** * Set rotation angle that can trigger the gesture * count Default is 16 range 1-31 * count Rotation angle is 22.5 * count * count = 16 22.5*count = 360 Rotate 360° to trigger the gesture */ // gr10_30.setCwsAngle(/*count*/16); // gr10_30.setCcwAngle(/*count*/16); /** * Set degrees of continuous rotation that can trigger the gesture * count Default is 4 range 1-31 * count The degrees of continuous rotation is 22.5 * count * For example: count = 4 22.5*count = 90 * Trigger the clockwise/counterclockwise rotation gesture first, if keep rotating, then the continuous rotation gesture will be triggered once every 90 degrees */ // gr10_30.setCwsAngleCount(/*count*/8); // gr10_30.setCcwAngleCount(/*count*/8); // Connect the interrupt pin of the development board #if defined(ESP32) || defined(ESP8266) /**! Select according to the set DADY pin polarity INPUT_PULLUP // Low polarity, set pin 13 to pull-up input INPUT_PULLDOWN // High polarity, set pin 13 to pull-down input interput io All pins can be used. Pin 13 is recommended */ pinMode(/*Pin */13 ,INPUT_PULLUP); attachInterrupt(/*interput io*/13, myInterrupt, ONLOW); #elif defined(ARDUINO_SAM_ZERO) pinMode(/*Pin */13 ,INPUT_PULLUP); attachInterrupt(/*interput io*/13, myInterrupt, LOW); #else /**! The Correspondence Table of AVR Series Arduino Interrupt Pins And Terminal Numbers * --------------------------------------------------------------------------------------- * | | Pin | 2 | 3 | | * | Uno, Nano, Mini, other 328-based |--------------------------------------------| * | | Interrupt No | 0 | 1 | | * |-------------------------------------------------------------------------------------| * | | Pin | 2 | 3 | 21 | 20 | 19 | 18 | * | Mega2560 |--------------------------------------------| * | | Interrupt No | 0 | 1 | 2 | 3 | 4 | 5 | * |-------------------------------------------------------------------------------------| * | | Pin | 3 | 2 | 0 | 1 | 7 | | * | Leonardo, other 32u4-based |--------------------------------------------| * | | Interrupt No | 0 | 1 | 2 | 3 | 4 | | * |-------------------------------------------------------------------------------------- */ /**! The Correspondence Table of micro:bit Interrupt Pins And Terminal Numbers * --------------------------------------------------------------------------------------------------------------------------------------------- * | micro:bit | DigitalPin |P0-P20 can be used as an external interrupt | * | (When using as an external interrupt, |---------------------------------------------------------------------------------------------| * |no need to set it to input mode with pinMode)|Interrupt No|Interrupt number is a pin digital value, such as P0 interrupt number 0, P1 is 1 | * |-------------------------------------------------------------------------------------------------------------------------------------------| */ /**! Select according to the set DADY pin polarity INPUT_PULLUP // Low polarity, set pin 2 to pull-up input */ pinMode(/*Pin */2 ,INPUT_PULLUP); /**! Set the pin to interrupt mode // Open the external interrupt 0, connect INT1/2 to the digital pin of the main control: function callback function state LOW // When the pin is at low level, the interrupt occur, enter interrupt function */ attachInterrupt(/*Interrupt No*/0, /*function*/myInterrupt ,/*state*/LOW ); #endif } void loop() { /**! When the interrupt occur in DRDY IO, get the geomagnetic data (get the data ready status through hardware) Enable interrupt again */ if(interruptFlag == 1){ uint16_t gestures = gr10_30.getGesturesState(); if(gestures&GESTURE_UP){ Serial.println("Up"); } if(gestures&GESTURE_DOWN){ Serial.println("Down"); } if(gestures&GESTURE_LEFT){ Serial.println("Left"); } if(gestures&GESTURE_RIGHT){ Serial.println("Right"); } if(gestures&GESTURE_FORWARD){ Serial.println("Forward"); } if(gestures&GESTURE_BACKWARD){ Serial.println("Backward"); } if(gestures&GESTURE_CLOCKWISE){ Serial.println("Clockwise"); } if(gestures&GESTURE_COUNTERCLOCKWISE){ Serial.println("Contrarotate"); } if(gestures&GESTURE_WAVE){ Serial.println("Wave"); } if(gestures&GESTURE_HOVER){ Serial.println("Hover"); } if(gestures&GESTURE_CLOCKWISE_C){ Serial.println("Continuous clockwise"); } if(gestures&GESTURE_COUNTERCLOCKWISE_C){ Serial.println("Continuous counterclockwise"); } interruptFlag = 0; #if defined(ESP32) || defined(ESP8266) attachInterrupt(13, myInterrupt, ONLOW); #elif defined(ARDUINO_SAM_ZERO) attachInterrupt(13, myInterrupt, LOW); #else attachInterrupt(0, myInterrupt, LOW); #endif } delay(1); }Result

Main API Functions
/** * @fn enGestures * @brief Enable gesture * @param gestures * GESTURE_UP * GESTURE_DOWN * GESTURE_LEFT * GESTURE_RIGHT * GESTURE_FORWARD * GESTURE_BACKWARD * GESTURE_CLOCKWISE * GESTURE_COUNTERCLOCKWISE * GESTURE_WAVE It is not suggested to enable rotation gesture (CW/CCW) and wave gesture at the same time. * GESTURE_HOVER Disable other gestures when hover gesture enables. * GESTURE_UNKNOWN * GESTURE_CLOCKWISE_C * GESTURE_COUNTERCLOCKWISE_C * @return NONE */ void enGestures(uint16_t gestures); /** * @fn getExist * @brief Get whether the object is in the detection range of sensor * @return Is the object in the detection range of sensor * @retval 1 Yes * @retval 0 No */ uint16_t getExist(void); /** * @fn getDataReady * @brief Get if a gesture is detected * @return Is the gesture detected * @retval 1 Detected * @retval 0 Not detected */ uint16_t getDataReady(void); /** * @fn getGesturesState * @brief Get gesture type * @return Gesture type * @retval GESTURE_UP * @retval GESTURE_DOWN * @retval GESTURE_DOWN * @retval GESTURE_LEFT * @retval GESTURE_RIGHT * @retval GESTURE_FORWARD * @retval GESTURE_BACKWARD * @retval GESTURE_CLOCKWISE * @retval GESTURE_COUNTERCLOCKWISE * @retval GESTURE_WAVE * @retval GESTURE_HOVER * @retval GESTURE_UNKNOWN * @retval GESTURE_CLOCKWISE_C * @retval GESTURE_COUNTERCLOCKWISE_C */ uint16_t getGesturesState(void); /** * @fn setUdlrWin * @brief Set the detection window you want * @param udSize Distance from top to bottom distance range 0-31 * @param lrSize Distance from left to right distance range 0-31 * @return NONE */ void setUdlrWin(uint8_t udSize, uint8_t lrSize); /** * @fn setLeftRange * @brief Set distance of moving to left that can be recognized * @param range * @n Distance range 0-31, must be less than distance from left to right of the detection window * @return NONE */ void setLeftRange(uint8_t range); /** * @fn setRightRange * @brief Set distance of moving to right that can be recognized * @param range * @n Distance range 0-31, must be less than distance from left to right of the detection window * @return NONE */ void setRightRange(uint8_t range); /** * @fn setUpRange * @brief Set distance of moving up that can be recognized * @param range * @n Distance range 0-31, must be less than distance from top to bottom of the detection window * @return NONE */ void setUpRange(uint8_t range); /** * @fn setDownRange * @brief Set distance of moving down that can be recognized * @param range * @n Distance range 0-31, must be less than distance from top to bottom of the detection window * @return NONE */ void setDownRange(uint8_t range); /** * @fn setForwardRange * @brief Set distance of moving forward that can be recognized * @param range * @n Distance range 0-31 * @return NONE */ void setForwardRange(uint8_t range); /** * @fn setBackwardRange * @brief Set distance of moving backward that can be recognized * @param range * @n Distance range 0-31 * @return NONE */ void setBackwardRange(uint8_t range); /** * @fn setWaveNumber * @brief Set wave number that can be recognized * @param number * @n Number range 0-15 * @return NONE */ void setWaveNumber(uint8_t number); /** * @fn setHovrWin * @brief Set hover detection window * @param udSize Distance from top to bottom distance range 0-31 * @param lrSize Distance from left to right distance range 0-31 * @return NONE */ void setHovrWin(uint8_t udSize, uint8_t lrSize); /** * @fn setHovrTimer * @brief Set hover time that can trigger the gesture * @param timer * @n timer 1-0x3ff 10ms-10s default is 0X3c 600ms * @return NONE */ void setHovrTimer(uint16_t timer); /** * @fn setCwsAngle * @brief Set clockwise rotation angle that can trigger the gesture * @param count Default is 16 range 1-31 * @n count Rotation angle is 22.5 * count * @n For example: count = 16 22.5*count = 360 Rotate 360° to trigger the gesture * @return NONE */ void setCwsAngle(uint8_t count); /** * @fn setCcwAngle * @brief Set counterclockwise rotation angle that can trigger the gesture * @param count Default is 16 range 1-31 * @n count Rotation angle is 22.5 * count * @n For example: count = 16 22.5*count = 360 Rotate 360° to trigger the gesture * @return NONE */ void setCcwAngle(uint8_t count); /** * @fn setCwsAngleCount * @brief Set clockwise rotation angle that can trigger the gesture * @param count Default is 4 range 1-31 * @n count The degree of continuous rotation is 22.5 * count * @n For example: count = 4 22.5*count = 90 * @n Trigger the clockwise/counterclockwise rotation gesture first, if keep rotating, then the continuous rotation gesture will be triggered once every 90 degrees * @return NONE */ void setCwsAngleCount(uint8_t count); /** * @fn setCcwAngleCount * @brief Set counterclockwise rotation angle that can trigger the gesture * @param count Default is 4 range 1-31 * @n count The degree of continuous rotation is 22.5 * count * @n For example: count = 4 22.5*count = 90 * @n Trigger the clockwise/counterclockwise rotation gesture first, if keep rotating, then the continuous rotation gesture will be triggered once every 90 degrees * @return NONE */ void setCcwAngleCount(uint8_t count);Tutorial for Raspberry Pi
Requirements
- Hardware
- Raspberry Pi 4 Model B (or similar) × 1
- Fermion: GR10-30 Gesture Sensor × 1
- DuPont Wires × 1
- Software
Connection Diagram
Connect the module to the Raspberry Pi according to the connection diagram.
Driver Installation
-
Enable I2C of Raspberry Pi. Skip this step if it is already enabled. Open terminal and input the following command and press Enter:
pi@raspberrypi:~ $ sudo raspi-config
Then use the UP/Down keys to select "5 Interfacing Options", press Enter, select "P5 I2C" and press Enter to comfirm "Yes". Reboot the Raspberry Pi board. -
To install Python dependency library and git, the Raspberry Pi needs to be connected to the Internet. Skip this step if they're already installed. In the terminal, input the following command and press Enter:
pi@raspberrypi:~ $ sudo apt-get updatepi@raspberrypi:~ $ sudo apt-get install build-essential python-dev python-smbus git -
Download DFRobot_GR10_30 driver library. In the terminal, input the following command and press Enter:
pi@raspberrypi:~ $ cd Desktop/pi@raspberrypi:~/Desktop $ git clone https://github.com/DFRobot/DFRobot_GR10_30
Sample Code
- Sample Code 1 - Get gesture by polling(get_getures.py)
- Sample Code 2 - Get gesture by interrupt(interrupt_get_getures.py)
Sample Code 1 - Get gesture by polling(get_getures.py)
- In the terminal, input the following command and press Enter to run the sample code:
pi@raspberrypi:~/Desktop $ cd DFRobot_GR10_30/python/raspberry/example/pi@raspberrypi:~/Desktop/DFRobot_GR10_30/python/raspberry/example/ $ python get_getures.py
Sample Code 2 - Get gesture by interrupt(interrupt_get_getures.py)
- In the terminal, input the following command and press Enter to run the sample code:
pi@raspberrypi:~/Desktop $ cd DFRobot_GR10_30/python/raspberry/example/pi@raspberrypi:~/Desktop/DFRobot_GR10_30/python/raspberry/example/ $ python interrupt_get_getures.py
- Hardware
วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
