
Quad DC Motor Driver Shield for Arduino (แท้จาก DFRobot)


| รหัสสินค้า | SA00153 |
| หมวดหมู่ | Motor Drive / Shield |
| ราคา | 825.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |

รายละเอียดสินค้า
INTRODUCTION
The latest quad motor driver shield for Arduino, compatible with 5V/3.3V Arduino controller, can control up to four DC motors with 8 pins at the same time. The shield supports PWM speed control and polarity control. The driver shield includes two TB6612FNG motor driver chips, compared with the traditional L298N chip, efficiency is improved and the component size also greatly reduced. The chip doesn't heat in to the rated range, and a single path maximum output 1.2A continuous current. The module includes a built-in low voltage detection circuit and thermal shutdown protection circuit, which is safe and reliable. This module is suitable for all kinds of DIY production.
SPECIFICATION
- VM Motor Power Supply: 2.5 V ~ 13.5 V
- VCC Logic Power Supply: 2.7 ~ 5.5 V
- Output Current: 1.2A continuous current (per channel)
- Start/Peak Current: 2A (continuous pulse) / 3.2A (single pulse)
- Arduino Control Port: Digital pins 3, 4, 5, 6, 7, 8, 11, 12
- Working Temperature: -20 ~ 85 ℃
- Dimensions: 53mm x 52mm/2.09 x 2.05'
- Weight: 24g
DOCUMENTS
SHIPPING LIST
-
Quad Motor Driver Shield for Arduino x1
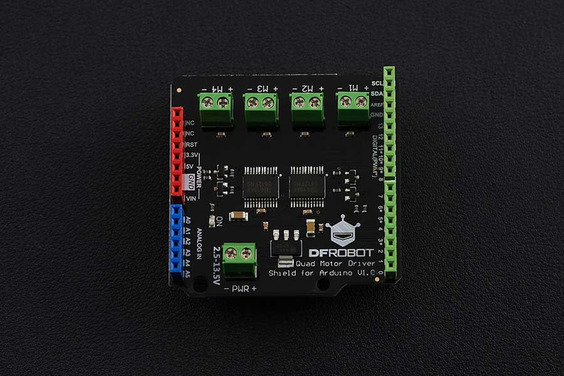
Board Overview

| Motor | Direction | Forward | Backward | Speed | Speed range |
| M1 | 4 | LOW | HIGH | 3 | 0-255 |
| M2 | 12 | HIGH | LOW | 11 | 0-255 |
| M3 | 8 | LOW | HIGH | 5 | 0-255 |
| M4 | 7 | HIGH | LOW | 6 | 0-255 |
Motor I/O
Tutorial
You Will Need
- Hardware
- DFRduino UNO R3 x 1
- Quad Motor Shield for Arduino x 1
- DC motor x 4
- Jumper Wires
- Software
- Arduino IDE Click to download Arduino IDE
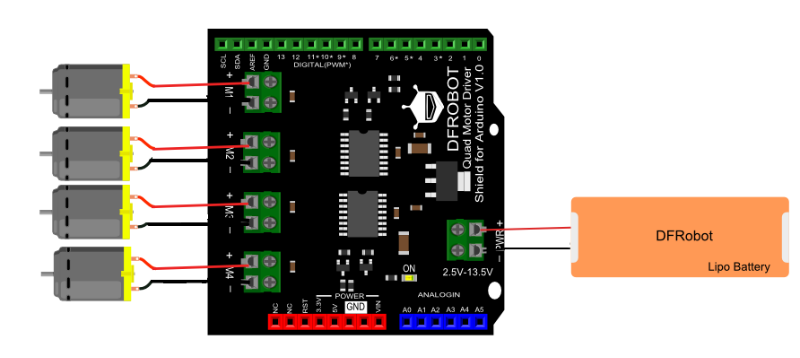
Connection Diagram

Sample Code
วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
