
Fermion: BNO055 Intelligent 9-axis Sensor (Breakout) (แท้จาก DFRobot)



| รหัสสินค้า | AS00553 |
| หมวดหมู่ | วัดความเร่ง/ไจโร/IMU |
| ราคา | 1,150.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |

รายละเอียดสินค้า
รายละเอียดและตัวอย่าง arduino โค๊ด Link1
Description:
BNO055 is a new sensor IC for implementing an intelligent 9-axis Absolute Orientation Sensor. It is a system in package, integrating a triaxial 14-bit accelerometer, a triaxial 16-bit gyroscope, a triaxial geomagnetic sensor and a 32-bit microcontroller. At just 5.2 x 3.8 x 1.1 mm³, it is significantly smaller than comparable discrete or system-on-board solutions and also is the sensor-hub product of the smallest size that supports Windows 8.1 at present.
BNO055 is able to provide not only single data of the three kinds of sensors (accelerometer/gyroscope/geomagnetic), but also integrated data, such as quaternions, Euler angles or vectors. Besides, the built-in MCU frees the users from the complexities of algorithm processing, which provides application support in many aspects for smart phone, wearable device and so on.
Specification:
- Operating Voltage: 3.3V-5.5V
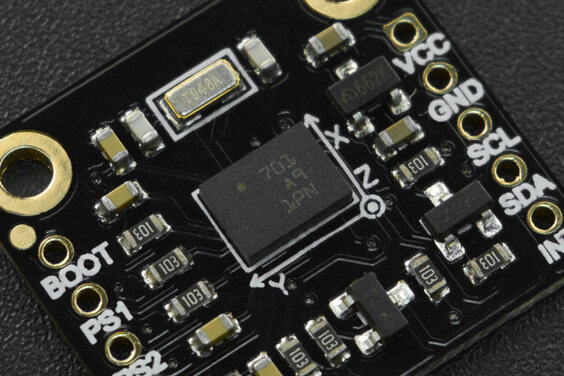
- Communication Interface: I2C (Support 5V) or SPI(Non-I2C ports only support 3.3V)
- Default I2C Address: 0x28
- BNO055 Accelerometer:
- Acceleration ranges ±2g/±4g/±8g/±16
- Low-pass filter bandwidths 1kHz~<8Hz
- Operation modes: normal, suspend, low power, standby, deep suspend
- BNO055 Gyroscope:
- Ranges switchable from ±125°/s~2000°/s
- Low-pass filter bandwidths 523Hz~12Hz
- Operation modes: normal, fast power up, deep suspend, suspend, advanced power save.
- On-chip interrupt control: motion-triggered interrupt-signal
- BNO055 Geomagnetic:
- Magnetic field range typical ±1300uT(x-,y-axis);±2500uT(z-axis)
- Magnetic field resolution: ~0.3
- Operating nodes: low power, regular, enhanced regular, high accuracy
- Power modes: normal, sleep, force
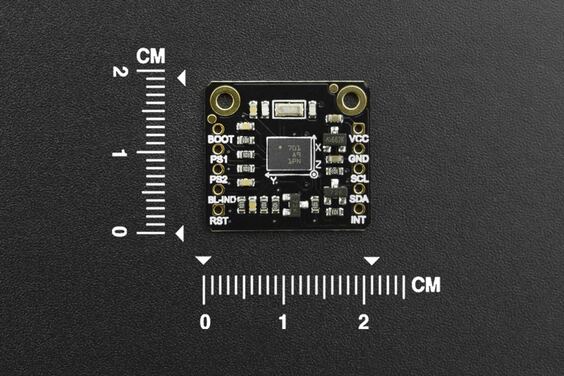
- Outline Dimension: 19 x 21mm/0.75 x 0.83”
- Mounting Hole Position: 16mm
- Mounting Hole Size: inner diameter 2mm/outer diameter 3.7mm
- BNO055 Intelligent 9-axis Sensor Module x1
- 2.54 Single Row 5PIN Connector x2
Tutorial
Visit the I2C address of BNO055 via I2C interface to get the related position data.
Requirements
- Hardware
- DFRduino UNO R3 (or similar) x 1
- BNO055 Intelligent 9-axis Sensor Module x1
- Jumper wires
- Software
- Arduino IDE
- Download and install the BMX160 Library (About how to install the library?)
Connection Diagram

BMX160 Tutorial
Function: read the pitch angle, roll angle and yaw angle of BNO055 sensor via I2C interface, and print out the data through the serial port. Using this demo with a small visual software Euler angle visual tool.exe we specifically designed, you can directly observe the attitude variation of 10DOF. As shown below.
If we compare 10DOF to an airplane whose nose points at due east, the positive direction of X axis will be the direction of the nose, the positive direction of Y axis will be the direction of the left wing, which is due north. Z axis is perpendicular to the plane XOY that formed by X and Y axes. When the 10 DOF’s direction of X, Y, and Z totally coincides with the above-mentioned direction, the values of the pitch, roll and yaw angle are 0°. Here we define: pitch is the angle between the nose and XOY when the airplane noses up or down along the Y axis, and nose up is positive while nose down is negative; roll is the angle between the body and XOY when the airplane rolls along the X axis; yaw is the angle between the nose and XOZ when the airplane moves along the Z axis.
 Please note that you need to close the serial port occupied by the printer when using the test software to observe the sensor’s movement posture.
Please note that you need to close the serial port occupied by the printer when using the test software to observe the sensor’s movement posture.
Sample Code
Function: get the acceleration data of the sensor’s movement on X, Z and Y, and print it out through the serial port.
/*!
* read_data.ino
*
* Download this demo to test read data from bno055
* Data will print on your serial monitor
*
* Product: http://www.dfrobot.com.cn/goods-1860.html
* Copyright [DFRobot](http://www.dfrobot.com), 2016
* Copyright GNU Lesser General Public License
*
* version V1.0
* date 07/03/2019
*/
#include "DFRobot_BNO055.h"
#include "Wire.h"
typedef DFRobot_BNO055_IIC BNO; // ******** use abbreviations instead of full names ********
BNO bno(&Wire, 0x28); // input TwoWire interface and IIC address
// show last sensor operate status
void printLastOperateStatus(BNO::eStatus_t eStatus)
{
switch(eStatus) {
case BNO::eStatusOK: Serial.println("everything ok"); break;
case BNO::eStatusErr: Serial.println("unknow error"); break;
case BNO::eStatusErrDeviceNotDetect: Serial.println("device not detected"); break;
case BNO::eStatusErrDeviceReadyTimeOut: Serial.println("device ready time out"); break;
case BNO::eStatusErrDeviceStatus: Serial.println("device internal status error"); break;
default: Serial.println("unknow status"); break;
}
}
void setup()
{
Serial.begin(115200);
bno.reset();
while(bno.begin() != BNO::eStatusOK) {
Serial.println("bno begin faild");
printLastOperateStatus(bno.lastOperateStatus);
delay(2000);
}
Serial.println("bno begin success");
}
#define printAxisData(sAxis) \
Serial.print(" x: "); \
Serial.print(sAxis.x); \
Serial.print(" y: "); \
Serial.print(sAxis.y); \
Serial.print(" z: "); \
Serial.println(sAxis.z)
void loop()
{
BNO::sAxisAnalog_t sAccAnalog, sMagAnalog, sGyrAnalog, sLiaAnalog, sGrvAnalog;
BNO::sEulAnalog_t sEulAnalog;
BNO::sQuaAnalog_t sQuaAnalog;
sAccAnalog = bno.getAxis(BNO::eAxisAcc); // read acceleration
sMagAnalog = bno.getAxis(BNO::eAxisMag); // read geomagnetic
sGyrAnalog = bno.getAxis(BNO::eAxisGyr); // read gyroscope
sLiaAnalog = bno.getAxis(BNO::eAxisLia); // read linear acceleration
sGrvAnalog = bno.getAxis(BNO::eAxisGrv); // read gravity vector
sEulAnalog = bno.getEul(); // read euler angle
sQuaAnalog = bno.getQua(); // read quaternion
Serial.println();
Serial.println("======== analog data print start ========");
Serial.print("acc analog: (unit mg) "); printAxisData(sAccAnalog);
Serial.print("mag analog: (unit ut) "); printAxisData(sMagAnalog);
Serial.print("gyr analog: (unit dps) "); printAxisData(sGyrAnalog);
Serial.print("lia analog: (unit mg) "); printAxisData(sLiaAnalog);
Serial.print("grv analog: (unit mg) "); printAxisData(sGrvAnalog);
Serial.print("eul analog: (unit degree) "); Serial.print(" head: "); Serial.print(sEulAnalog.head); Serial.print(" roll: "); Serial.print(sEulAnalog.roll); Serial.print(" pitch: "); Serial.println(sEulAnalog.pitch);
Serial.print("qua analog: (no unit) "); Serial.print(" w: "); Serial.print(sQuaAnalog.w); printAxisData(sQuaAnalog);
Serial.println("======== analog data print end ========");
delay(1000);
}Sample Code
Function: moitor the sensor interrupts, including high/low speed interrupt, and fast tilt interrupt.
/*!
* interrupt.ino
*
* Download this demo to test bno055 interrupt
* Connect bno055 int pin to arduino pin 2
* If there occurs interrupt, it will printr on you serial monitor, more detail please refer to comments
*
* Product: http://www.dfrobot.com.cn/goods-1860.html
* Copyright [DFRobot](http://www.dfrobot.com), 2016
* Copyright GNU Lesser General Public License
*
* version V1.0
* date 07/03/2019
*/
#include "DFRobot_BNO055.h"
#include "Wire.h"
typedef DFRobot_BNO055_IIC BNO; // ******** use abbreviations instead of full names ********
BNO bno(&Wire, 0x28); // input TwoWire interface and IIC address
// show last sensor operate status
void printLastOperateStatus(BNO::eStatus_t eStatus)
{
switch(eStatus) {
case BNO::eStatusOK: Serial.println("everything ok"); break;
case BNO::eStatusErr: Serial.println("unknow error"); break;
case BNO::eStatusErrDeviceNotDetect: Serial.println("device not detected"); break;
case BNO::eStatusErrDeviceReadyTimeOut: Serial.println("device ready time out"); break;
case BNO::eStatusErrDeviceStatus: Serial.println("device internal status error"); break;
default: Serial.println("unknow status"); break;
}
}
bool intFlag = false;
void intHandle()
{
intFlag = true;
}
void setup()
{
Serial.begin(115200);
bno.reset();
while(bno.begin() != BNO::eStatusOK) {
Serial.println("bno begin faild");
printLastOperateStatus(bno.lastOperateStatus);
delay(2000);
}
Serial.println("bno begin success");
bno.setOprMode(BNO::eOprModeConfig); // set to config mode
bno.setIntMaskEnable(BNO::eIntAll); // set interrupt mask enable, signal to int pin when interrupt
// bno.setIntMaskDisable(BNO::eIntAccAm | BNO::eIntAccNm); // set interrupt mask disable, no signal to int pin when interrupt
bno.setIntEnable(BNO::eIntAll); // set interrupt enable
// bno.setIntDisable(BNO::eIntAccAm | BNO::eIntAccNm); // set interrupt disable
bno.setAccIntEnable(BNO::eAccIntSetAll); // set accelerometer interrupt enable
// bno.setAccIntDisable(BNO::eAccIntSetAmnmXAxis | BNO::eAccIntSetHgXAxis); // set accelerometer interrupt disable
/* accelerometer any motion threshold to set, unit mg, value is dependent on accelerometer range selected,
* case 2g, no more than 1991
* case 4g, no more than 3985
* case 8g, no more than 7968
* case 16g, no more than 15937
* attenion: The set value will be slightly biased according to datasheet
* tips: default accelerometer range is 4g
*/
// how to trig this: still --> fast move
bno.setAccAmThres(200);
// any motion interrupt triggers if duration consecutive data points are above the any motion interrupt
// threshold define in any motion threshold
bno.setAccIntAmDur(1);
// set high-g duration, value from 2ms to 512ms
bno.setAccHighGDuration(80);
/*
* accelerometer high-g threshold to set, unit mg, value is dependent on accelerometer range selected,
* case 2g, no more than 1991
* case 4g, no more than 3985
* case 8g, no more than 7968
* case 16g, no more than 15937
* Attenion: The set value will be slightly biased according to datasheet
*/
// how to trig this: still --> (very) fast move
bno.setAccHighGThres(900);
// accelerometer (no motion) / (slow motion) settings, 2nd parameter unit seconds, no more than 344
bno.setAccNmSet(BNO::eAccNmSmnmNm, 4);
/*
* accelerometer no motion threshold to set, unit mg, value is dependent on accelerometer range selected,
* case 2g, no more than 1991
* case 4g, no more than 3985
* case 8g, no more than 7968
* case 16g, no more than 15937
* Attenion: The set value will be slightly biased according to datasheet
*/
// hot to trig this: any motion --> still --> still
bno.setAccNmThres(100);
bno.setGyrIntEnable((BNO::eGyrIntSet_t) (BNO::eGyrIntSetHrXAxis | BNO::eGyrIntSetHrYAxis | BNO::eGyrIntSetHrZAxis)); // set gyroscope interrupt enable, in most cases, this is enough.
// bno.setGyrIntEnable(BNO::eGyrIntSetAmYAxis | BNO::eGyrIntSetAmYAxis | BNO::eGyrIntSetAmZAxis); // set gyroscope interrupt enable
// bno.setGyrIntDisable(BNO::eGyrIntSetHrXAxis | BNO::eGyrIntSetAmXAxis); // set gyroscope interrupt disable
/*
* 2nd parameter, high rate threshold to set, unit degree/seconds, value is dependent on gyroscope range selected,
* case 2000, no more than 1937
* case 1000, no more than 968
* case 500, no more than 484
* case 250, no more than 242
* case 125, no more than 121
* Attenion: The set value will be slightly biased according to datasheet
* 3rd parameter, high rate duration to set, unit ms, duration from 2.5ms to 640ms
* Attenion: The set value will be slightly biased according to datasheet
*/
// how to trigger this: still --> fast tilt
bno.setGyrHrSet(BNO::eSingleAxisX, 300, 80);
bno.setGyrHrSet(BNO::eSingleAxisY, 300, 80);
bno.setGyrHrSet(BNO::eSingleAxisZ, 300, 80);
/*
* gyroscope any motion threshold to set, unit mg, value is dependent on accelerometer range selected,
* case 2000, no more than 128
* case 1000, no more than 64
* case 500, no more than 32
* case 250, no more than 16
* case 125, no more than 8
* Attenion: The set value will be slightly biased according to datasheet
* tips: default range is 2000
*/
// how to trigger this: still --> fast tilt
bno.setGyrAmThres(20);
bno.setOprMode(BNO::eOprModeNdof); // configure done
attachInterrupt(0, intHandle, RISING); // attach interrupt
bno.getIntState(); // clear unexpected interrupt
intFlag = false;
}
void loop()
{
if(intFlag) {
intFlag = false;
uint8_t intSta = bno.getIntState(); // interrupt auto clear after read
Serial.println("interrupt detected");
if(intSta & BNO::eIntAccAm)
Serial.println("accelerometer any motion detected");
if(intSta & BNO::eIntAccNm)
Serial.println("accelerometer no motion detected");
if(intSta & BNO::eIntAccHighG)
Serial.println("acceleromter high-g detected");
if(intSta & BNO::eIntGyrHighRate)
Serial.println("gyroscope high rate detected");
if(intSta & BNO::eIntGyrAm)
Serial.println("gyroscope any motion detected");
}
}Sample Code
Function: sensor configuration.
/*!
* config.ino
*
* Download this demo to test config to bno055
* Data will print on your serial monitor
*
* Product: http://www.dfrobot.com.cn/goods-1860.html
* Copyright [DFRobot](http://www.dfrobot.com), 2016
* Copyright GNU Lesser General Public License
*
* version V1.0
* date 07/03/2019
*/
#include "DFRobot_BNO055.h"
#include "Wire.h"
typedef DFRobot_BNO055_IIC BNO; // ******** use abbreviations instead of full names ********
BNO bno(&Wire, 0x28); // input TwoWire interface and IIC address
// show last sensor operate status
void printLastOperateStatus(BNO::eStatus_t eStatus)
{
switch(eStatus) {
case BNO::eStatusOK: Serial.println("everything ok"); break;
case BNO::eStatusErr: Serial.println("unknow error"); break;
case BNO::eStatusErrDeviceNotDetect: Serial.println("device not detected"); break;
case BNO::eStatusErrDeviceReadyTimeOut: Serial.println("device ready time out"); break;
case BNO::eStatusErrDeviceStatus: Serial.println("device internal status error"); break;
default: Serial.println("unknow status"); break;
}
}
void setup()
{
Serial.begin(115200);
bno.reset();
while(bno.begin() != BNO::eStatusOK) {
Serial.println("bno begin faild");
printLastOperateStatus(bno.lastOperateStatus);
delay(2000);
}
Serial.println("bno begin success");
bno.setPowerMode(BNO::ePowerModeNormal); // set to normal power mode
bno.setOprMode(BNO::eOprModeConfig); // must set sensor to config-mode before configure
bno.setAccPowerMode(BNO::eAccPowerModeNormal); // set acc to normal power mode
bno.setGyrPowerMode(BNO::eGyrPowerModeNormal); // set gyr to normal power mode
bno.setMagPowerMode(BNO::eMagPowerModeForce); // set mag to force power mode
// accelerometer normal configure
bno.setAccRange(BNO::eAccRange_4G); // set range to 4g
bno.setAccBandWidth(BNO::eAccBandWidth_62_5); // set band width 62.5HZ
bno.setAccPowerMode(BNO::eAccPowerModeNormal); // set accelerometer power mode
// magnetometer normal configure
bno.setMagDataRate(BNO::eMagDataRate_20); // set output data rate 20HZ
bno.setMagPowerMode(BNO::eMagPowerModeForce); // set power mode
bno.setMagOprMode(BNO::eMagOprModeRegular); // set operate mode
// gyroscope normal configure
bno.setGyrRange(BNO::eGyrRange_2000); // set range
bno.setGyrBandWidth(BNO::eGyrBandWidth_32); // set band width
bno.setGyrPowerMode(BNO::eGyrPowerModeNormal); // set power mode
BNO::sAxisAnalog_t sOffsetAcc; // unit mg, members can't out of acc range
BNO::sAxisAnalog_t sOffsetMag; // unit ut, members can't out of mag range
BNO::sAxisAnalog_t sOffsetGyr; // unit dps, members can't out of gyr range
sOffsetAcc.x = 1;
sOffsetAcc.y = 1;
sOffsetAcc.z = 1;
sOffsetMag.x = 1;
sOffsetMag.y = 1;
sOffsetMag.z = 1;
sOffsetGyr.x = 1;
sOffsetGyr.y = 1;
sOffsetGyr.z = 1;
bno.setAxisOffset(BNO::eAxisAcc, sOffsetAcc); // set offset
bno.setAxisOffset(BNO::eAxisMag, sOffsetMag);
bno.setAxisOffset(BNO::eAxisGyr, sOffsetGyr);
bno.setOprMode(BNO::eOprModeNdof); // shift to other operate mode, reference datasheet for more detail
}
#define printAxisData(sAxis) \
Serial.print(" x: "); \
Serial.print(sAxis.x); \
Serial.print(" y: "); \
Serial.print(sAxis.y); \
Serial.print(" z: "); \
Serial.println(sAxis.z)
void loop()
{
BNO::sAxisAnalog_t sAccAnalog, sMagAnalog, sGyrAnalog, sLiaAnalog, sGrvAnalog;
BNO::sEulAnalog_t sEulAnalog;
BNO::sQuaAnalog_t sQuaAnalog;
sAccAnalog = bno.getAxis(BNO::eAxisAcc);
sMagAnalog = bno.getAxis(BNO::eAxisMag);
sGyrAnalog = bno.getAxis(BNO::eAxisGyr);
sLiaAnalog = bno.getAxis(BNO::eAxisLia);
sGrvAnalog = bno.getAxis(BNO::eAxisGrv);
sEulAnalog = bno.getEul();
sQuaAnalog = bno.getQua();
Serial.println();
Serial.println("======== analog data print start ========");
Serial.print("acc analog: (unit mg) "); printAxisData(sAccAnalog);
Serial.print("mag analog: (unit ut) "); printAxisData(sMagAnalog);
Serial.print("gyr analog: (unit dps) "); printAxisData(sGyrAnalog);
Serial.print("lia analog: (unit mg) "); printAxisData(sLiaAnalog);
Serial.print("grv analog: (unit mg) "); printAxisData(sGrvAnalog);
Serial.print("eul analog: (unit degree) "); Serial.print(" head: "); Serial.print(sEulAnalog.head); Serial.print(" roll: "); Serial.print(sEulAnalog.roll); Serial.print(" pitch: "); Serial.println(sEulAnalog.pitch);
Serial.print("qua analog: (no unit) "); Serial.print(" w: "); Serial.print(sQuaAnalog.w); printAxisData(sQuaAnalog);
Serial.println("======== analog data print end ========");
delay(1000);
}Expected Results

วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
