
URM12 - Ultra Long Range Ultrasonic Distance Sensor (70~1500cm, RS485) - ของแท้ DFRobot






| รหัสสินค้า | AS00534 |
| หมวดหมู่ | LIDAR / เซ็นเซอร์วัดระยะทาง / ความเร็ว Distance / Speed |
| ราคา | 8,750.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |

รายละเอียดสินค้า
INTRODUCTION
This URM12 from DFRobot is a long range ultrasonic distance sensor designed for distance ranging or obstacle avoidance applications. The sensor offers up to 1500cm detection distance, 3Hz measuring frequency and 15° detection angle. It adopts RS485 communication interface and supports standard Modbus-RTU communication protocol, which is suitable for level measurement, robot obstacle avoidance and so on.
URM12 Beam Angle
SPECIFICATION
- Power Supply: 9-24VDC
- Rated Power: 4.8W
- Operating Temperature Range: -10℃ to +70℃
- Effective Detection Range: 70cm to 1500cm
- Resolution: 1cm
- Accuracy: 1%
- IP Grade: IP65
- Direction Angle: 15°±2°(-6dB)
- Measuring Frequency: 3Hz Max
- Communication Interface: RS485
- Communication Protocol: Modbus-RTU
DOCUMENTS
SHIPPING LIST
- URM12 - Ultra Long Range Ultrasonic Distance Sensor (70~1500cm, RS485) x1
Module Overview
Wiring Order
-
Black (thick line)----Shielded cable
-
White------------------VCC
-
Black (thin line)------GND
-
Orange-----------------RS485-A
-
Brown------------------RS485-B
Register Description
|
Register Address |
Number |
Name |
Read/Write |
Data Range |
Default Value |
Data Description |
|---|---|---|---|---|---|---|
|
0x00 |
1 |
Module PID Register |
R |
0x0000-0xFFFF |
0x0001 |
Product check (Detect module type) |
|
0x01 |
1 |
Module VID Register |
R |
0x0000-0xFFFF |
0x0010 |
Version check (0x0010 represents V0.0.1.0) |
|
0x02 |
1 |
Module Address Register |
R/W |
0x0001-0x00F7 |
0x000B |
When the sensor address is unknown, write to the register through the broadcast address 0x00, at this time, the sensor will not have data output |
|
0x03 |
1 |
Serial parameter control register 1 |
R/W |
0x0000-0xFFFF |
0x0005 |
Module Baudrate: 0x0001---2400 0x0003---9600 0x0004---14400 0x0005---19200 0x0006---38400 0x0007---57600 0x0008---115200 Other----115200 |
|
0x04 |
1 |
Serial parameter control register 2 |
R/W |
0x0000-0xFFFF |
0x0001 |
Module check bit H: Stop bit L: 0x00---None 0x00---0.5byte 0x01---Even 0x01---1byte 0x02---Odd 0x02---1.5byte other---none 0x03---2byte Other---1byte |
|
0x05 |
1 |
Distance register |
R |
0x0000-0xFFFF |
0x0000 |
The distance value LSB measured by the module represents 1cm |
|
0x06 |
1 |
Onboard temperature data register |
R |
0x0000-0xFFFF |
0x0000 |
The temperature value measured by the onboard temperature sensor represents 0.1℃ (with unit symbol) |
|
0x07 |
1 |
External temperature compensation data register |
R/W |
0x0000-0xFFFF |
0x0000 |
LSB write ambient temperature data to this register for external temperature compensation represents 0.1℃ (with unit symbol) |
|
0x08 |
1 |
Control register |
R/W |
0x0000-0xFFFF |
0x0004 |
bit 1: 0 00-use onboard temperature compensation function 01-use external temperature compensation function (Users need to write temperature data to external temperature compensation data register) 1x-Not use temperature compensation function bit 2: 0-auto detection 1-passive detection bit 3: In passive detection mode, write 1 to this bit, then it will measure distance once. The distance value can be read from distance register 300ms later. This bit is disabled in passive detection mode. |
Register Read/Write
Requirements
-
Hardware
-
1 x Arduino Leonardo (Since RS485 to TTL will occupy one serial port, it is recommended using a device with two or more serial ports like Arduino Leonardo. Arduino Modbus protocol takes up a lot of memory, so we recommend to use Arduino mega2560 board.)
-
1 x RS485 Shield for Arduino
-
1 x DC Power Supply (DC 24V)
-
1 x USB Cable (Connect Arduino board and a PC)
-
-
Software
-
Open "Library Manager"(Ctrl+Shift+I) in IDE, find and install ArduinoModbus and ArduinoRS485 libraries.

- Hardware Connection

Read Measured Distance
Measure distance in passive ranging mode.

Read Data from Onboard Temperature Sensor

Modify Module Address

Modify Module Baud Rate

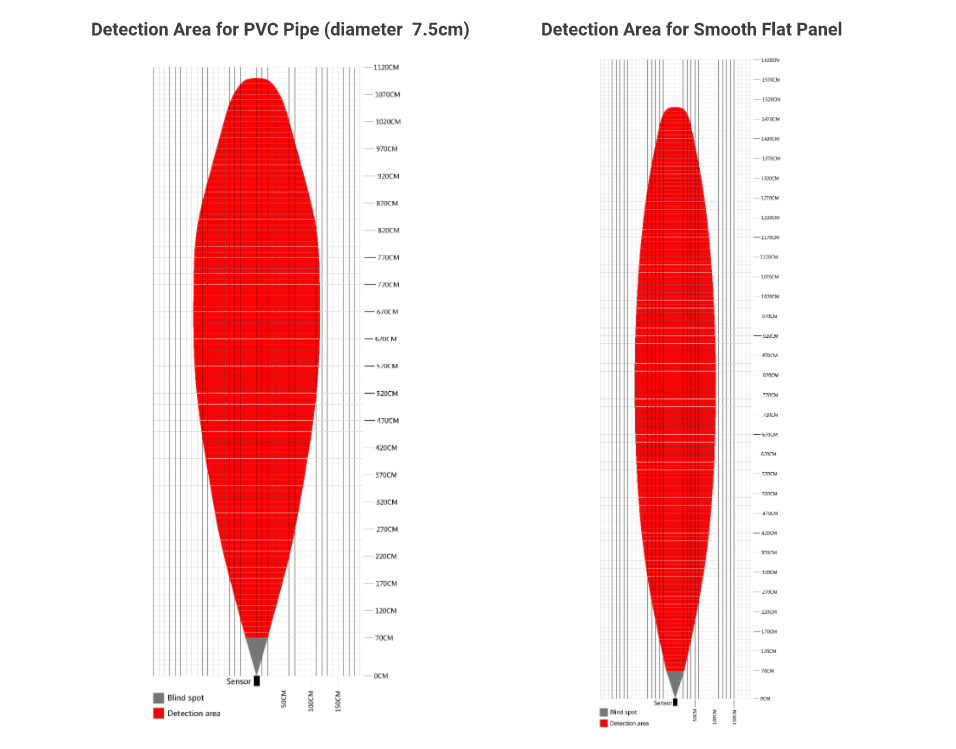
Detetion Angle and Sensitivity
Normally, the detection area of an ultrasonic sensor is irregular and hard to define due to its physical characteristics. In actual use, we found that the detection area and sensitivity of this sensor may be larger than other ultrasonic sensors. Therefore, when the sensor is used in a narrow space, a non-target object may be detected.
We used two kinds of reference target obstacles to repeatedly test many sample products. The reference detection area of the corresponding target is as follows:
- Detection area for 7.5cm PVC pipe

- Detection area for 100x30cm plane plate

วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
