
URM08 - Waterproof Industrial Ultrasonic Distance Sensor (35~550cm, ModBus-RTU) - ของแท้ DFRobot






| รหัสสินค้า | AS00533 |
| หมวดหมู่ | LIDAR / เซ็นเซอร์วัดระยะทาง / ความเร็ว Distance / Speed |
| ราคา | 3,985.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |

รายละเอียดสินค้า
INTRODUCTION
With an internal temperature compensation and accurate distance detection, URM08-RS485 is a combination of temperature measurement device and distance inspection tool. The inner is fully enclosed and the external is made of metal crust, which has brought advantages such as waterproof, dustproof and corrosion resistance. It is applicable to detections of liquid level, levels, and barrier applications. As a high standard sensor, it guarantees smaller blind zone and larger inspection range. On the premise of stable output data, it shows better measurement capabilities in the market of temperature sensors and distance detection sensors.
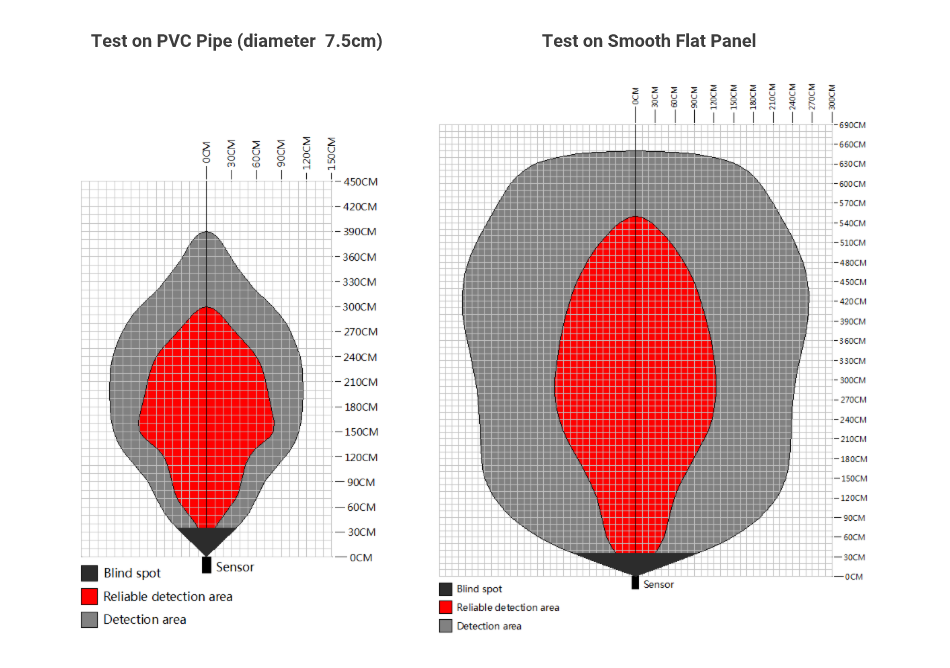
URM08 Beam Angle
APPLICATIONS
- Industrial controlling machines
SPECIFICATION
- Operating Voltage: DC 6.0 ~ 12.0V
- Operating Current: 250mA
- Effective Range: 35 ~ 550 cm
- Distance Resolution: 1cm
- Temperature Resolution: 0.1°C
- Temperature Error: ± 1 ℃
- Measurement Period: 70ms
- Operating Temperature Range: -10 ~ 70 ℃
- Distance Error: ±1%
- Operating Humidity Range: RH<75%
- Acoustic Frequency: 38 ~ 42KHz
- Direction Angle: 60 °
- Protection Grade: IP65
- Communication Interface: RS485 ModBus-RTU
DOCUMENTS
SHIPPING LIST
- URM08 - Wafterproof Industrial Ultrasonic Distance Sensor (35~550cm, ModBus-RTU) x1
- Screw Nuts x2
- Metal Pads x2
- Adaptor Wire x1
Board Overview

Module Interface Line Sequence:
- Orange - VCC
- Black - GND
- Blue - RS485-B
- White - RS485-A
Register Description
| Address | Number | Name | Read/Write | Data Range | Default | Data Description |
|---|---|---|---|---|---|---|
| 0x00 | 1 | Module PID register | R | 0x0000-0xFFFF | 0x0005 | Product check (detect module type) |
| 0x01 | 1 | Module VID register | R | 0x0000-0xFFFF | 0x0010 | Version check (0x0010 represents V0.0.1.0) |
| 0x02 | 1 | Module address register | R/W | 0x0001-0x00F7 | 0x000F | When the sensor address is unknown, write to the register through the broadcast address 0x00, at this time, the sensor will not have data output Save when powered off, take effect after restarting |
| 0x03 | 1 | Serial parameter control register 1 | R/W | 0x0000-0xFFFF | 0x0005 | Module Baud Rate: 0x0001---2400 0x0003---9600 0x0004---14400 0x0005---19200 0x0006---38400 0x0007---57600 0x0008---115200 Other----115200 Save when powered off, take effect after restarting |
| 0x04 | 1 | Serial parameter control register 2 | R/W | 0x0000-0xFFFF | 0x0001 | Reserved (serial data format is fixed at: no parity bit, 1 stop bit, 8 data bits) Save when powered off, take effect after restarting |
| 0x05 | 1 | Distance register | R | 0x0000-0xFFFF | 0xFFFF | The distance value LSB measured by the module represents 0.1cm |
| 0x06 | 1 | Onboard temperature data Register | R | 0x0000-0xFFFF | 0x0000 | The temperature value LSB measured by the onboard temperature sensor represents 0.1℃ (with unit symbol) |
| 0x07 | 1 | External temperature compensation data register | R/W | 0x0000-0xFFFF | 0x0000 | Write ambient temperature data to this register for external temperature compensation, LSB represents 0.1℃ (with unit symbol) |
| 0x08 | 1 | Control register | R/W | 0x0000-0xFFFF | 0x0004 | bit0: 0-use onboard temperature compensation function 1-use external temperature compensation function (users need to write temperature data to external temperature compensation data register) bit1: 0-enable temperature compensation function 1-disable temperature compensation function bit2: 0-auto detection 1-passive detection bit3: In passive detection mode, write 1 to this bit, then it will measure distance once, and the distance value can be read from distance register about 65ms later. In auto detection mode, this bit is reserved. This bit will be auto cleared when set to 1. Save when powered off, take effect after restarting |
Register Read/Write Sample
Requirements
-
Hardware
- Arduino Leonardo x 1
- RS485 Shield for Arduino x 1
- USB Data Cable x 1 (Connect the Arduino board to a computer via the USB cable)
-
Software
- Arduino IDE
- Open Library Manager(Ctrl+Shift+I) in Arduino IDE, find and install DFRobot_RTU library.
-
Diagram of Connecting to LEONARDO

- Diagram of Connecting to UNO

- Diagram of Connecting to MEGA

Read Detected Distance
/**************************************************************************************************************
* @This code tests the range finder function of the URM15 ultrasonic sensor
* @brief Change device ID of modbus slave. Each modbus slave has a unique device ID number in the range of 0x0000~0x00F7(0~247).
* @ And there are two ways to change the device ID:
* @n 1: If you don't know the device ID, you can change slave ID address by broadcast
* @n address 0x00, this command will change the address of all the slaves on the bus to the ID to be set(when
* @n changing address with 0x00, it is better to connect only one device on the bus)
* @n 2: If you know the device ID, change it directly
* @n note:To run this demo, you must know the serial port configuration of the device (baud rate, data bit, check bit, stop bit)
* @n connected table
* ---------------------------------------------------------------------------------------------------------------
* sensor pin | MCU | Leonardo/Mega2560/M0 | UNO | ESP8266 | ESP32 | microbit |
* VCC | 3.3V/5V | VCC | VCC | VCC | VCC | X |
* GND | GND | GND | GND | GND | GND | X |
* RX | TX | Serial1 RX1 | 5 |5/D6(TX) | D2 | X |
* TX | RX | Serial1 TX1 | 4 |4/D7(RX) | D3 | X |
* ---------------------------------------------------------------------------------------------------------------
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @licence The MIT License (MIT)
* @ author : roker.wang@dfrobot.com
* @ data : 26.10.2021
* @ version: 1.0
**************************************************************************************************************/
#include "DFRobot_RTU.h"
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
#include <SoftwareSerial.h>
#endif
#define SLAVE_ADDR ((uint16_t)0x0F)
#define TEMP_CPT_SEL_BIT ((uint16_t)0x01)
#define TEMP_CPT_ENABLE_BIT ((uint16_t)0x01 << 1)
#define MEASURE_MODE_BIT ((uint16_t)0x01 << 2)
#define MEASURE_TRIG_BIT ((uint16_t)0x01 << 3)
typedef enum{
ePid,
eVid,
eAddr,
eComBaudrate,
eComParityStop,
eDistance,
eInternalTempreture,
eExternTempreture,
eControl
}eRegIndex_t;//Sensor register index
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
SoftwareSerial mySerial(/*rx =*/4, /*tx =*/5);
DFRobot_RTU modbus(/*s =*/&mySerial);
#else
DFRobot_RTU modbus(/*s =*/&Serial1);
#endif
volatile uint16_t cr = 0;
void setup() {
Serial.begin(9600);
while(!Serial){ //Waiting for USB Serial COM port to open.
}
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
mySerial.begin(19200);
#elif defined(ESP32)
Serial1.begin(19200, SERIAL_8N1, /*rx =*/D3, /*tx =*/D2);
#else
Serial1.begin(19200);
#endif
delay(1000);
cr |= MEASURE_MODE_BIT;//Set bit2 , Set to trigger mode
cr &= ~(uint16_t)TEMP_CPT_SEL_BIT;//Select internal temperature compensation
cr &= ~(uint16_t)TEMP_CPT_ENABLE_BIT;//enable temperature compensation
modbus.writeHoldingRegister(/*id =*/SLAVE_ADDR, /*reg =*/ eControl, /*val =*/cr);
delay(1000);
}
float dist;
void loop() {
cr |= MEASURE_TRIG_BIT;//Set trig bit
modbus.writeHoldingRegister(/*id =*/SLAVE_ADDR, /*reg =*/ eControl, /*val =*/cr);
delay(300);
dist = modbus.readHoldingRegister(SLAVE_ADDR, eDistance);
if(dist == 65535){
Serial.println("out of range!");
}else{
Serial.print("distance = ");
Serial.print(dist / 10, 1);
Serial.println("cm");
}
}
Read Onboard Temperature
/**************************************************************************************************************
* @This code tests the temperature measurement function of the URM15 ultrasonic sensor
* @brief Change device ID of modbus slave. Each modbus slave has a unique device ID number in the range of 0x0000~0x00F7(0~247).
* @ And there are two ways to change the device ID:
* @n 1: If you don't know the device ID, you can change slave ID address by broadcast
* @n address 0x00, this command will change the address of all the slaves on the bus to the ID to be set(when
* @n changing address with 0x00, it is better to connect only one device on the bus)
* @n 2: If you know the device ID, change it directly
* @n note:To run this demo, you must know the serial port configuration of the device (baud rate, data bit, check bit, stop bit)
* @n connected table
* ---------------------------------------------------------------------------------------------------------------
* sensor pin | MCU | Leonardo/Mega2560/M0 | UNO | ESP8266 | ESP32 | microbit |
* VCC | 3.3V/5V | VCC | VCC | VCC | VCC | X |
* GND | GND | GND | GND | GND | GND | X |
* RX | TX | Serial1 RX1 | 5 |5/D6(TX) | D2 | X |
* TX | RX | Serial1 TX1 | 4 |4/D7(RX) | D3 | X |
* ---------------------------------------------------------------------------------------------------------------
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @licence The MIT License (MIT)
* @ author : roker.wang@dfrobot.com
* @ data : 26.10.2021
* @ version: 1.0
**************************************************************************************************************/
#include "DFRobot_RTU.h"
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
#include <SoftwareSerial.h>
#endif
#define SLAVE_ADDR ((uint16_t)0x0F)
#define TEMP_CPT_SEL_BIT ((uint16_t)0x01)
#define TEMP_CPT_ENABLE_BIT ((uint16_t)0x01 << 1)
#define MEASURE_MODE_BIT ((uint16_t)0x01 << 2)
#define MEASURE_TRIG_BIT ((uint16_t)0x01 << 3)
typedef enum{
ePid,
eVid,
eAddr,
eComBaudrate,
eComParityStop,
eDistance,
eInternalTempreture,
eExternTempreture,
eControl
}eRegIndex_t;//Sensor register index
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
SoftwareSerial mySerial(/*rx =*/4, /*tx =*/5);
DFRobot_RTU modbus(/*s =*/&mySerial);
#else
DFRobot_RTU modbus(/*s =*/&Serial1);
#endif
volatile uint16_t cr = 0;
void setup() {
Serial.begin(9600);
while(!Serial){ //Waiting for USB Serial COM port to open.
}
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
mySerial.begin(19200);
#elif defined(ESP32)
Serial1.begin(19200, SERIAL_8N1, /*rx =*/D3, /*tx =*/D2);
#else
Serial1.begin(19200);
#endif
delay(1000);
}
float temp;
void loop() {
temp = modbus.readHoldingRegister(SLAVE_ADDR, eInternalTempreture);
Serial.print(temp / 10,1);
Serial.println("C");
delay(500);
}
Revise Module Address
/**************************************************************************************************************
* @This code tests the address modification function of the URM15 ultrasonic sensor
* @brief Change device ID of modbus slave. Each modbus slave has a unique device ID number in the range of 0x0000~0x00F7(0~247).
* @ And there are two ways to change the device ID:
* @n 1: If you don't know the device ID, you can change slave ID address by broadcast
* @n address 0x00, this command will change the address of all the slaves on the bus to the ID to be set(when
* @n changing address with 0x00, it is better to connect only one device on the bus)
* @n 2: If you know the device ID, change it directly
* @n note:To run this demo, you must know the serial port configuration of the device (baud rate, data bit, check bit, stop bit)
* @n connected table
* ---------------------------------------------------------------------------------------------------------------
* sensor pin | MCU | Leonardo/Mega2560/M0 | UNO | ESP8266 | ESP32 | microbit |
* VCC | 3.3V/5V | VCC | VCC | VCC | VCC | X |
* GND | GND | GND | GND | GND | GND | X |
* RX | TX | Serial1 RX1 | 5 |5/D6(TX) | D2 | X |
* TX | RX | Serial1 TX1 | 4 |4/D7(RX) | D3 | X |
* ---------------------------------------------------------------------------------------------------------------
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @licence The MIT License (MIT)
* @ author : roker.wang@dfrobot.com
* @ data : 26.10.2021
* @ version: 1.0
**************************************************************************************************************/
#include "DFRobot_RTU.h"
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
#include <SoftwareSerial.h>
#endif
#define SLAVE_ADDR ((uint16_t)0x0F)
#define TEMP_CPT_SEL_BIT ((uint16_t)0x01)
#define TEMP_CPT_ENABLE_BIT ((uint16_t)0x01 << 1)
#define MEASURE_MODE_BIT ((uint16_t)0x01 << 2)
#define MEASURE_TRIG_BIT ((uint16_t)0x01 << 3)
typedef enum{
ePid,
eVid,
eAddr,
eComBaudrate,
eComParityStop,
eDistance,
eInternalTempreture,
eExternTempreture,
eControl
}eRegIndex_t;//Sensor register index
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
SoftwareSerial mySerial(/*rx =*/4, /*tx =*/5);
DFRobot_RTU modbus(/*s =*/&mySerial);
#else
DFRobot_RTU modbus(/*s =*/&Serial1);
#endif
volatile uint16_t cr = 0;
void setup() {
Serial.begin(9600);
while(!Serial){ //Waiting for USB Serial COM port to open.
}
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
mySerial.begin(19200);
#elif defined(ESP32)
Serial1.begin(19200, SERIAL_8N1, /*rx =*/D3, /*tx =*/D2);
#else
Serial1.begin(19200);
#endif
delay(1000);
}
volatile uint16_t newAddr, res;
void loop() {
newAddr = 0x11;
modbus.writeHoldingRegister(/*id =*/SLAVE_ADDR, /*reg =*/ eAddr, /*val =*/newAddr);
delay(50);
res = modbus.readHoldingRegister(SLAVE_ADDR, eAddr);
if(res == newAddr){
Serial.print("The device address has been modified as ");
Serial.print(newAddr);
Serial.println(".please reset the device!");
}else{
Serial.print("Failed to change the sensor address!");
}
while(1);
}
Revise Module Baud Rate
/**************************************************************************************************************
* @This code tests the baudrate modification function of the URM15 ultrasonic sensor
* @brief Change device ID of modbus slave. Each modbus slave has a unique device ID number in the range of 0x0000~0x00F7(0~247).
* @ And there are two ways to change the device ID:
* @n 1: If you don't know the device ID, you can change slave ID address by broadcast
* @n address 0x00, this command will change the address of all the slaves on the bus to the ID to be set(when
* @n changing address with 0x00, it is better to connect only one device on the bus)
* @n 2: If you know the device ID, change it directly
* @n note:To run this demo, you must know the serial port configuration of the device (baud rate, data bit, check bit, stop bit)
* @n connected table
* ---------------------------------------------------------------------------------------------------------------
* sensor pin | MCU | Leonardo/Mega2560/M0 | UNO | ESP8266 | ESP32 | microbit |
* VCC | 3.3V/5V | VCC | VCC | VCC | VCC | X |
* GND | GND | GND | GND | GND | GND | X |
* RX | TX | Serial1 RX1 | 5 |5/D6(TX) | D2 | X |
* TX | RX | Serial1 TX1 | 4 |4/D7(RX) | D3 | X |
* ---------------------------------------------------------------------------------------------------------------
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @licence The MIT License (MIT)
* @ author : roker.wang@dfrobot.com
* @ data : 26.10.2021
* @ version: 1.0
**************************************************************************************************************/
#include "DFRobot_RTU.h"
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
#include <SoftwareSerial.h>
#endif
#define SLAVE_ADDR ((uint16_t)0x0F)
#define TEMP_CPT_SEL_BIT ((uint16_t)0x01)
#define TEMP_CPT_ENABLE_BIT ((uint16_t)0x01 << 1)
#define MEASURE_MODE_BIT ((uint16_t)0x01 << 2)
#define MEASURE_TRIG_BIT ((uint16_t)0x01 << 3)
typedef enum{
ePid,
eVid,
eAddr,
eComBaudrate,
eComParityStop,
eDistance,
eInternalTempreture,
eExternTempreture,
eControl
}eRegIndex_t;//Sensor register index
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
SoftwareSerial mySerial(/*rx =*/4, /*tx =*/5);
DFRobot_RTU modbus(/*s =*/&mySerial);
#else
DFRobot_RTU modbus(/*s =*/&Serial1);
#endif
volatile uint16_t cr = 0;
void setup() {
Serial.begin(9600);
while(!Serial){ //Waiting for USB Serial COM port to open.
}
#if defined(ARDUINO_AVR_UNO)||defined(ESP8266)
mySerial.begin(19200);
#elif defined(ESP32)
Serial1.begin(19200, SERIAL_8N1, /*rx =*/D3, /*tx =*/D2);
#else
Serial1.begin(19200);
#endif
delay(1000);
cr |= MEASURE_MODE_BIT;//Set bit2 , Set to trigger mode
cr &= ~(uint16_t)TEMP_CPT_SEL_BIT;//Select internal temperature compensation
cr &= ~(uint16_t)TEMP_CPT_ENABLE_BIT;//enable temperature compensation
modbus.writeHoldingRegister(/*id =*/SLAVE_ADDR, /*reg =*/ eControl, /*val =*/cr);
delay(1000);
}
volatile uint16_t baudrateIndex, res;
void loop() {
uint16_t res;
baudrateIndex = 3; //0x0001---2400 0x0002---4800 0x0003---9600 0x0004---14400
//0x0005---19200 0x0006---38400 0x0007---57600 0x0008---115200 Other----115200
modbus.writeHoldingRegister(SLAVE_ADDR, eComBaudrate, baudrateIndex);//Writes the new baud rate value to the corresponding register
delay(50);
res = modbus.readHoldingRegister(SLAVE_ADDR, eComBaudrate);
if (res == baudrateIndex)
Serial.print("The baudrate has been modified as 9600.please reset the device!");
while (1);
}
วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
