
Serial 6-Axis Accelerometer for Arduino (ของแท้จาก DFRobot)







| รหัสสินค้า | AS00406 |
| หมวดหมู่ | วัดความเร่ง/ไจโร/IMU |
| ราคา | 1,285.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |

รายละเอียดสินค้า
INTRODUCTION
This module integrates high-precision gyroscopes, accelerometer, microprocessor of high-performance and advanced dynamics solves and Kalman filter algorithms that aim to quickly solve the current real-time movement of the module attitude. The use of advanced digital filtering technology can effectively reduce measurement noise and improve accuracy.
The module comes with built-in gesture solver that can get accurate attitude in dynamic environment combining with dynamic Kalman filter algorithm. Its static measurement accuracy is up to 0.05 degree(dynamic 0.1) with high stability, which could bring better performance even than some professional Inclinometers!
There is a voltage stabilizer circuit inside the module. The product should be operated at 3.3~5V and its pin level is compatible with 3.3/5V embedded systems. It employs TTL interface for connection. In addition, the module supports adjustable 2400bps~921600bps baud rate and 0.1Hz~200Hz data output.

Connection
SPECIFICATION
- Voltage: 3.3V~5V
- Current: <40mA
- Size: 51.3 x 36 x 10mm
- Measuring Dimension: acceleration: 3D; angular velocity: 3D; attitude angle: 3D
- Range: acceleration: ±2/4/8/16g(optional); angular velocity: ±250/500/1000/2000°/s (Optional); attitude angle: ±180°
DOCUMENTS
SHIPPING LIST
- Serial 6-Axis Accelerometer x1
- Wire x1
Tutorial
Requirements
- Hardware
- DFRduino UNO R3 (or similar) x 1
- Serial 6-Axis Accelerometer x1
- Software
- Arduino IDE
- Download and install the DFRobot_WT61PC Library (About how to install the library?)
Connection
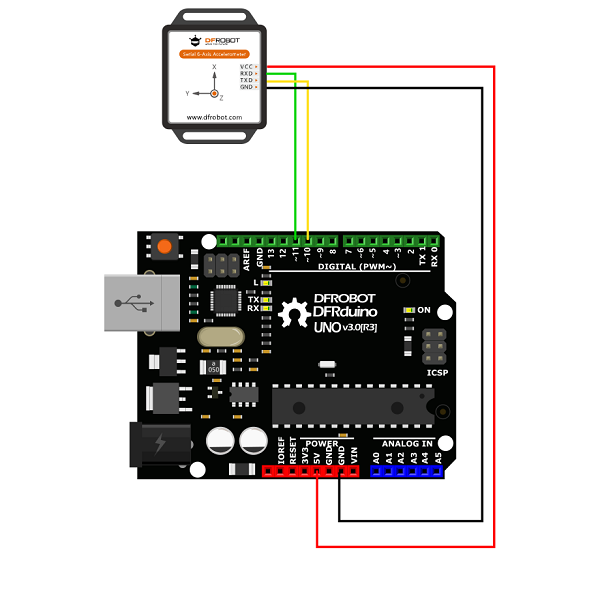
| WT61PC | Arduino UNO |
|---|---|
| VCC | 5V/3V |
| RXD | D11 |
| TXD | D10 |
| GND | GND |
Sample Code
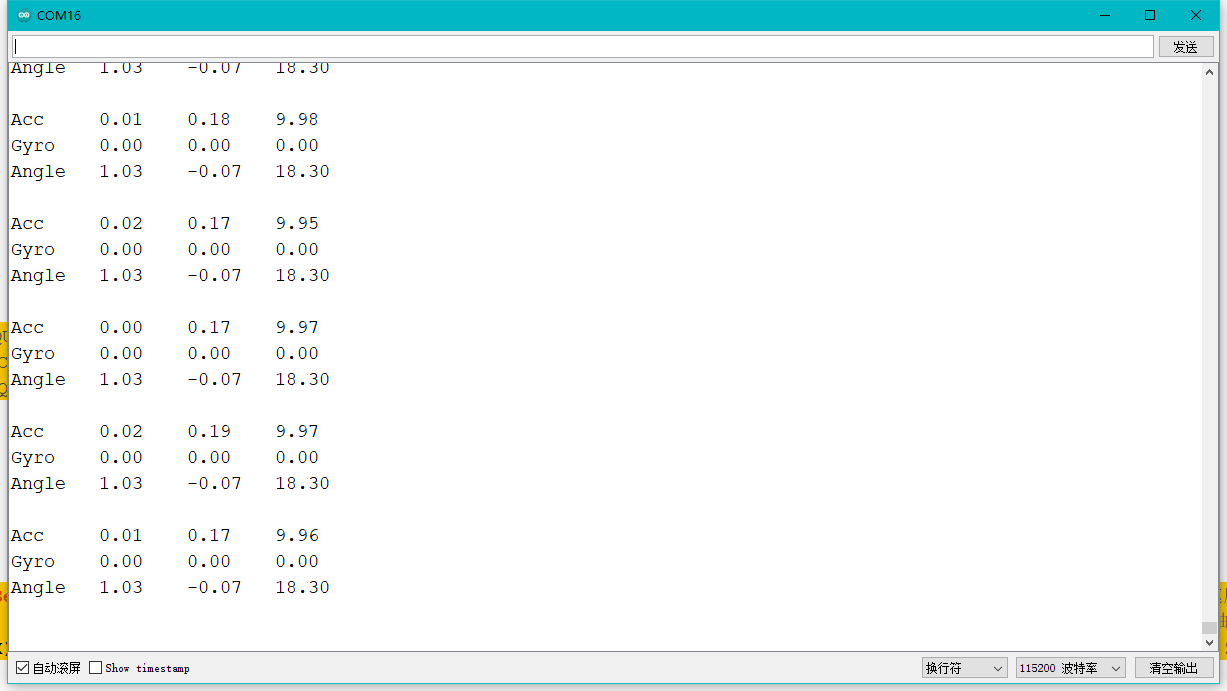
Expected Results
วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
MEMBER
