
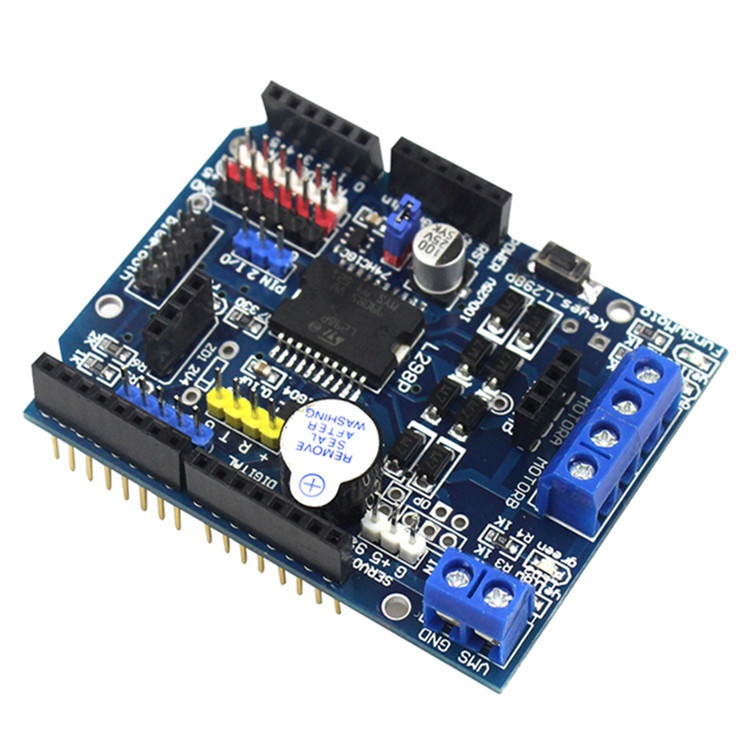
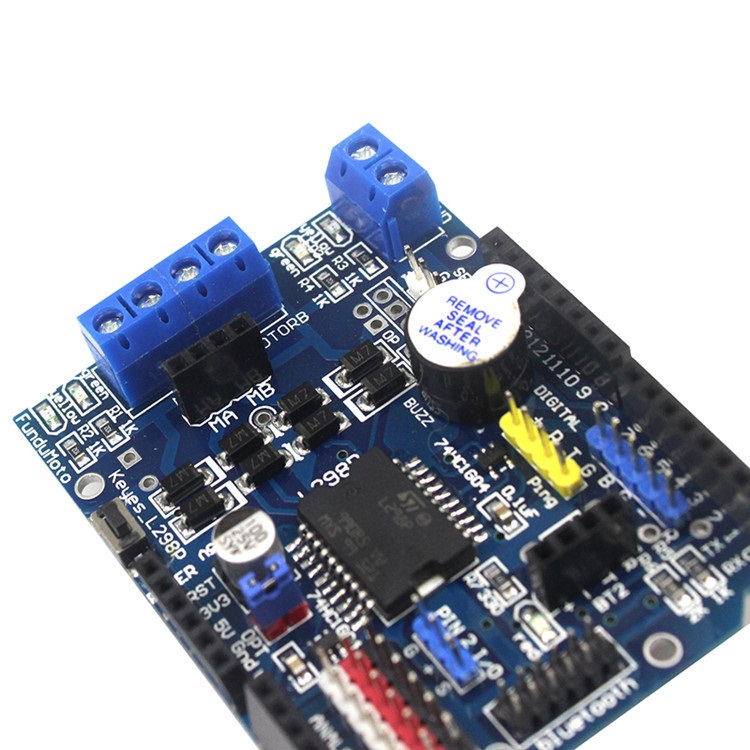
L298P DC Motor Drive Shield / Expansion Board

| รหัสสินค้า | SA10008 |
| หมวดหมู่ | Motor Drive / Shield |
| ราคา | 280.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

Tags : L298P Shield 2A High Current Dual DC Motor Drive, 2A, L298P, Shield, Motor drive shield, L298P expansion board, L298P shield, Motor shield
รายละเอียดสินค้า
1. Input voltage logic portion VD: 5 V
2. The driving part of the input voltage VS: VIN Input 6 5 ~ 1 2 V, PWRIN input 4 8 ~ 2 4 V..
3. The logic part of the work current I ss: ≤3 6 m A
4. The driving part of the work current I o: ≤2 A
5. Maximum Power Dissipation: 2 5 W (T = 7 5 ℃)
6. A control signal input level: High: 2 3 V≤V in≤5 V Low: -... 0 3 V≤V in≤1 5 V
7. Working temperature: - 2 5 ℃ ~ + 1 3 0 ℃
8. Drive: Dual high-power H-bridge driver
Features:
1. board with L298P motor driver chip, the direct digital IO port with the motherboard (D10 .D11. D12. D13), without cumbersome wiring.
2. Onboard beeper (D4), may be provided reversing alarm ringing.
3. Convenient motor interface, the motor output can be two routes.
4. The two-way Bluetooth interface, can be directly inserted, no wiring.
5 out of the D 2, D 3, D 5, D 6, D 7, D 9, D is not occupied by seven digital interface.
6 a A 0 - A 5 six analog interface.
7. forward and back lights are turned.
Arduino test code:
int E1 = 10;
int M1 = 12;
int E2 =11;
int M2 = 13;
void setup()
{
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
}
void loop()
{
{ int value;
for(value = 0 ; value <= 255; value+=5)
{
digitalWrite(M1,HIGH);
digitalWrite(M2, HIGH);
analogWrite (E1, value); // PWM
analogWrite (E2, value); // PWM
delay(30);
}
delay(1000);}
{ int value;
for(value = 0 ; value <= 255; value+=5)
{
digitalWrite(M1,LOW);
digitalWrite(M2, LOW);
analogWrite (E1, value); // PWM
analogWrite (E2, value); // PWM
delay(30);
}
delay(1000);}
}
หมายเหตุ: ARDUINO download code to the control panel, plug in the L298P motor shield, connected to an external power supply, you can motor up action.
วิธีการชำระเงิน
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีธนาคาร KBANK, SCB, BBL,TMB
กรุณาเก็บหลักฐานการโอนเงินของท่านไว้เพื่อแจ้งการชำระเงินด้วยค่ะ
ท่านสามารถแจ้งการชำระเงินผ่านระบบอัตโนมัติได้โดย Click Link ข้างล่างค่ะ
https://www.arduitronics.com/informpayment
ชำระเงินผ่านธนาคาร


@rfm0967y
ติดต่อสอบถาม
Join เป็นสมาชิกร้านค้า
ร้านArduitronics
/www.arduitronics.com/
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ
MEMBER
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม